Comment rapidement mettre en œuvre le positionnement à l'aide de modules GNSS multi-constellations
Avec la contribution de Rédacteurs nord-américains de DigiKey
2021-09-09
L'utilisation de fonctions basées sur la position avec des récepteurs GNSS (système global de navigation par satellite) multi-constellations pour les systèmes de positionnement Galileo (Europe), GPS (États-Unis), GLONASS (Russie), BeiDou (Chine) et QZSS (Japon) se développe dans de nombreuses applications, notamment la robotique, les véhicules autonomes, l'automatisation industrielle, la logistique et le suivi des actifs, les drones, et les équipements agricoles et de construction. Les avantages de l'utilisation de récepteurs GNSS multi-constellations incluent : meilleure disponibilité des signaux de positionnement, navigation et synchronisation (PNS), précision et intégrité accrues et robustesse améliorée des applications.
Mais le développement de récepteurs multi-constellations est une activité complexe et fastidieuse qui inclut : l'optimisation de l'antenne en bande L ; la conception de l'interface radiofréquence (RF) ; l'intégration des algorithmes de traitement des signaux en bande de base pour acquérir et suivre les différents signaux PNS et leur appliquer des corrections ; le codage du logiciel de traitement de l'application pour extraire les données PNS de chaque canal de la bande de base et l'utilisation des informations pour mettre en œuvre les fonctions du système. Les concepteurs doivent également choisir une antenne appropriée et la placer correctement.
Les concepteurs peuvent également opter pour des environnements de développement et des modules GNSS pré-conçus pour intégrer rapidement et efficacement la capacité de positionnement dans un système. Ces modules GNSS incluent un circuit d'entrée RF, le traitement en bande de base et un micrologiciel embarqué pour accélérer le développement de logiciels de traitement des applications. Certains modules GNSS incluent également les antennes.
Cet article passe en revue les principes de base des concepts GNSS et PNS, et le fonctionnement des récepteurs GNSS multi-constellations. Il étudie ensuite les avantages et les inconvénients de l'intégration d'antennes dans les modules GNSS avant de présenter plusieurs modules GNSS — avec et sans antennes intégrées — et cartes d'évaluation associées de STMicroelectronics, Septentrio et Würth Elektronik que les concepteurs peuvent utiliser pour développer de manière efficace et rentable des applications de positionnement précises et robustes.
Présentations des concepts GNSS et PNS
Les concepts GNSS et PNS sont étroitement liés. Les satellites GNSS sont la source la plus courante de signaux PNS. Les satellites GNSS sont essentiellement des horloges synchronisées hautement précises qui diffusent en permanence leurs informations PNS. Un module GNSS reçoit les signaux PNS d'un satellite donné et calcule sa distance par rapport à ce satellite. Lorsque le récepteur connaît la distance d'au moins quatre satellites, il peut estimer sa propre position. Cependant, la précision de l'estimation de la position est affectée par diverses sources d'erreur, notamment :
- Dérive d'horloge des circuits de synchronisation dans les satellites GNSS
- Imprécisions dans la prévision de la position orbitale exacte des satellites GNSS
- Dérive des performances globales de tout l'équipement satellitaire par rapport à d'autres satellites, également appelée biais de satellite
- Distorsions et retards dans la transmission des signaux lorsqu'ils traversent l'ionosphère et la troposphère
- Réflexions par trajets multiples et dérive et performances variables dans le récepteur
Les concepteurs disposent de diverses techniques pour corriger les erreurs GNSS satellitaires et atmosphériques.
Améliorer les performances GNSS
La meilleure façon de minimiser l'impact des erreurs provenant du récepteur GNSS est d'utiliser le récepteur le plus performant qui correspond aux contraintes de coût et de taille d'une application donnée. Malheureusement, même les récepteurs les plus performants ne sont pas parfaits ; leurs performances peuvent très probablement être améliorées. Il est important de comprendre ces méthodes de correction car elles offrent des performances variables, et certains modules GNSS ne sont pas capables de les mettre toutes en œuvre.
Les stations de référence au sol sont utilisées par plusieurs méthodes de correction GNSS (Figure 1). Les méthodes les plus établies d'utilisation de stations de référence au sol pour fournir des corrections GNSS aux récepteurs sont la cinématique temps réel (RTK) et le positionnement ponctuel précis (PPP). Plus récemment, des méthodes hybrides RTK-PPP sont également devenues disponibles.
 Figure 1 : Un récepteur utilisateur GNSS peut obtenir des informations sur les erreurs d'atmosphère, d'horloge et d'orbite à partir d'un réseau de référence afin d'améliorer la précision du positionnement. (Source de l'image : Septentrio)
Figure 1 : Un récepteur utilisateur GNSS peut obtenir des informations sur les erreurs d'atmosphère, d'horloge et d'orbite à partir d'un réseau de référence afin d'améliorer la précision du positionnement. (Source de l'image : Septentrio)
La méthode RTK s'appuie sur une seule station de base ou sur un réseau de référence local pour obtenir des données de correction qui peuvent éliminer la plupart des erreurs GNSS. La RTK suppose que la station de base et le récepteur sont situés à proximité l'un de l'autre — à une distance maximale de 40 kilomètres (km) ou 25 miles — et qu'ils subissent donc les mêmes erreurs. La cinématique post-traitée ou PPK est une variante de la RTK et est largement utilisée dans les domaines de la topographie et de la cartographie pour obtenir des données de positionnement de haute précision ou une précision centimétrique.
Seules les erreurs d'horloge satellite et d'orbite sont utilisées pour effectuer les corrections PPP. Ces erreurs spécifiques au satellite sont indépendantes de l'emplacement de l'utilisateur, ce qui limite le nombre de stations de référence requises. Cependant, le PPP ne tient pas compte des erreurs liées à l'atmosphère et sa précision est donc inférieure à celle de la RTK. En outre, les corrections PPP peuvent avoir des temps d'initialisation d'environ 20 minutes. Le temps d'initialisation plus long et la précision moindre rendent le PPP peu pratique pour de nombreuses applications.
Les applications nécessitant une précision proche de la RTK et des temps d'initialisation rapides utilisent souvent le tout dernier service de correction GNSS, RTK-PPP (parfois appelé représentation en espace d'états (SSR)). Ce service utilise un réseau de référence avec des stations espacées d'environ 100 km (65 miles), qui collectent des données GNSS et calculent une combinaison de corrections satellitaires et atmosphériques. Le réseau de référence utilise les réseaux de téléphonie mobile, Internet ou satellitaires pour envoyer les données de correction aux abonnés. Les récepteurs GNSS utilisant la méthode RTK-PPP peuvent atteindre une précision inférieure au décimètre. Le choix d'utiliser les méthodes de correction RTK, PPP et RTK-PPP implique un certain nombre de compromis de conception que les développeurs doivent prendre en compte pour sélectionner la solution optimale pour leur profil applicatif spécifique (Figure 2).
 Figure 2 : Points forts et points faibles de trois méthodes de correction GNSS courantes. (Source de l'image : Septentrio)
Figure 2 : Points forts et points faibles de trois méthodes de correction GNSS courantes. (Source de l'image : Septentrio)
Les systèmes de renforcement satellitaire (SBAS) commencent à être disponibles sur une base régionale pour remplacer les méthodes de correction RTK, PPP et RTK-PPP basées sur les stations au sol. Un système SBAS utilise toujours des stations au sol pour mesurer les erreurs GNSS, mais ces stations sont réparties sur des continents entiers. Les erreurs mesurées sont traitées à un emplacement central où les corrections sont calculées et transmises à des satellites géosynchrones sur la zone couverte. Les données de correction sont diffusées par les satellites sous forme de recouvrement ou d'augmentation des données GNSS originales.
La précision GNSS dépend de la disponibilité et de la précision des mesures satellitaires et des corrections associées. Les récepteurs GNSS hautes performances suivent les signaux GNSS à plusieurs fréquences et utilisent plusieurs constellations GNSS et diverses méthodes de correction pour offrir la précision et la résilience nécessaires. La redondance qui en résulte permet d'obtenir des performances stables même si certaines des mesures et données satellitaires subissent des interférences. Les concepteurs peuvent choisir parmi une variété de capacités de redondance et de précision GNSS (Figure 3).
 Figure 3 : Niveaux de précision GNSS avec les méthodes de correction correspondantes et les applications sélectionnées. (Source de l'image : Septentrio)
Figure 3 : Niveaux de précision GNSS avec les méthodes de correction correspondantes et les applications sélectionnées. (Source de l'image : Septentrio)
Modules GNSS : antennes intégrées ou externes
En raison de la complexité du positionnement multi-constellation, des modules sont disponibles auprès de divers fournisseurs pour accélérer la mise sur le marché, réduire les coûts et garantir les performances. Toutefois, les concepteurs doivent évaluer s'il est préférable d'utiliser une antenne interne ou de plutôt opter pour une antenne externe pour le module GNSS. Pour les applications dans lesquelles les délais de commercialisation et les coûts sont une priorité, une antenne intégrée peut être préférable car elle nécessite beaucoup moins d'ingénierie. Pour les applications qui exigent une certification FCC ou CE, l'utilisation d'un module avec une antenne intégrée peut également accélérer le processus d'approbation. Cependant, la taille de la solution peut augmenter, et la flexibilité peut être limitée avec les solutions d'antennes intégrées.
Les antennes externes offrent aux concepteurs un éventail plus large de performances et d'options de configuration. Il est possible de choisir une grande antenne hautes performances ou une antenne plus petite mais moins performante. De plus, le placement de l'antenne est plus flexible par rapport à l'emplacement du module GNSS, ce qui améliore davantage la flexibilité de la conception. La flexibilité de placement permet également aux antennes externes de fournir un fonctionnement GNSS plus fiable. Cependant, le placement des antennes et le routage des connexions peuvent constituer un processus long et complexe, exigeant une expertise spécifique, et augmentant potentiellement les coûts et ralentissant la mise sur le marché.
Module GNSS miniature pour conceptions à espace restreint
Les équipes de conception disposant de l'expertise requise en matière de placement et de routage d'antennes peuvent tirer parti du Teseo-LIV3F de STMicroelectronics, un module GNSS multi-constellation (GPS/Galileo/GLONASS/BeiDou/QZSS) qui utilise une antenne externe (Figure 4). Le module est fourni en boîtier LCC-18 mesurant 9,7 mm x 10,1 mm, et il offre une précision de positionnement avec une probabilité d'erreur circulaire (CEP) de 1,5 mètre (m), avec un temps TTFF (Time to First Fix) pour le démarrage à froid et à chaud inférieur à 32 secondes (s) et à 1,5 s, respectivement (GPS, GLONASS). Il a une consommation en mode veille de 17 microwatts (µW) et en mode suivi de 75 milliwatts (mW).
 Figure 4 : Le module GNSS Teseo-LIV3F inclut le cœur et les sous-systèmes GNSS, ainsi que toutes les capacités de connectivité et de gestion de l'alimentation requises, dans un boîtier de 9,7 mm x 10,1 mm. Il requiert une antenne externe. (Source de l'image : STMicroelectronics)
Figure 4 : Le module GNSS Teseo-LIV3F inclut le cœur et les sous-systèmes GNSS, ainsi que toutes les capacités de connectivité et de gestion de l'alimentation requises, dans un boîtier de 9,7 mm x 10,1 mm. Il requiert une antenne externe. (Source de l'image : STMicroelectronics)
L'oscillateur à quartz à compensation de température (TCXO) de 26 mégahertz (MHz) embarqué dans le Teseo-LIV3F contribue à garantir une haute précision, et l'oscillateur d'horloge temps réel (RTC) dédié de 32 kilohertz (kHz) permet de réduire le délai TTFF. Des fonctionnalités telles que l'enregistrement des données, le GNSS à assistance autonome de sept jours, la reconfigurabilité du micrologiciel (FW) et les mises à niveau micrologicielles sont possibles grâce à la mémoire Flash embarquée de 16 mégabits (Mb).
Les applications possibles du Teseo-LIV3F incluent les assurances, la logistique, les drones, les péages, les systèmes antivol, la localisation des personnes et des animaux, le suivi des véhicules et les appels d'urgence.
En tant que solution pré-certifiée, l'utilisation du module Teseo-LIV3F peut permettre de réduire le temps de mise sur le marché de l'application finale. Le module offre une plage de températures de fonctionnement de -40°C à +85°C.
Pour tester le module et accélérer le développement des applications, les concepteurs peuvent utiliser la carte d'évaluation AEK-COM-GNSST31. Lorsqu'il est utilisé conjointement avec le micrologiciel X-CUBE-GNSS1, le pack d'évaluation peut prendre en charge les fonctions d'acquisition, de suivi, de navigation et de sortie de données sans mémoire externe. Cette carte d'évaluation est également conçue pour une utilisation avec un microcontrôleur SPC5 pour le développement d'applications automobiles.
Module GNSS avec atténuation des interférences
Le récepteur GNSS multi-constellation mosaic-X5 410322 de Septentrio est un module basse consommation à montage en surface mesurant 31 mm x 31 mm x 4 mm, qui offre aux concepteurs une série d'interfaces, notamment quatre UART, Ethernet, USB, SDIO et deux GPIO programmables par l'utilisateur.
Conçu pour être utilisée dans la robotique, les systèmes autonomes et d'autres applications grand public, le mosaic-X5 présente une fréquence de rafraîchissement de 100 Hertz (Hz), une latence inférieure à 10 millisecondes (ms) et une précision de détermination de la position RTK verticale et horizontale de 0,6 cm et 1 cm, respectivement. Il peut suivre toutes les constellations GNSS, en prenant en charge les signaux actuels et futurs, et il est compatible avec les corrections PPP, SSR, RTK et SBAS. Le délai TTFF du module est inférieur à 45 s pour le démarrage à froid et à 20 s pour le démarrage à chaud.
Le mosaic-X5 est doté de plusieurs technologies brevetées de Septentrio, notamment AIM+, une technologie embarquée d'atténuation des interférences qui supprime de nombreuses sources d'interférences, des simples signaux continus à bande étroite aux brouilleurs pulsés et large bande complexes.
Les interfaces, les commandes et les messages de données des modules sont entièrement documentés. Le logiciel RxTools inclus permet la configuration et la surveillance du récepteur, ainsi que l'enregistrement et l'analyse des données.
Le kit de développement mosaic-X5 410331P3161 de Septentrio permet aux concepteurs d'explorer, d'évaluer et de développer des prototypes qui tirent pleinement parti des capacités du mosaic-X5 (Figure 5).
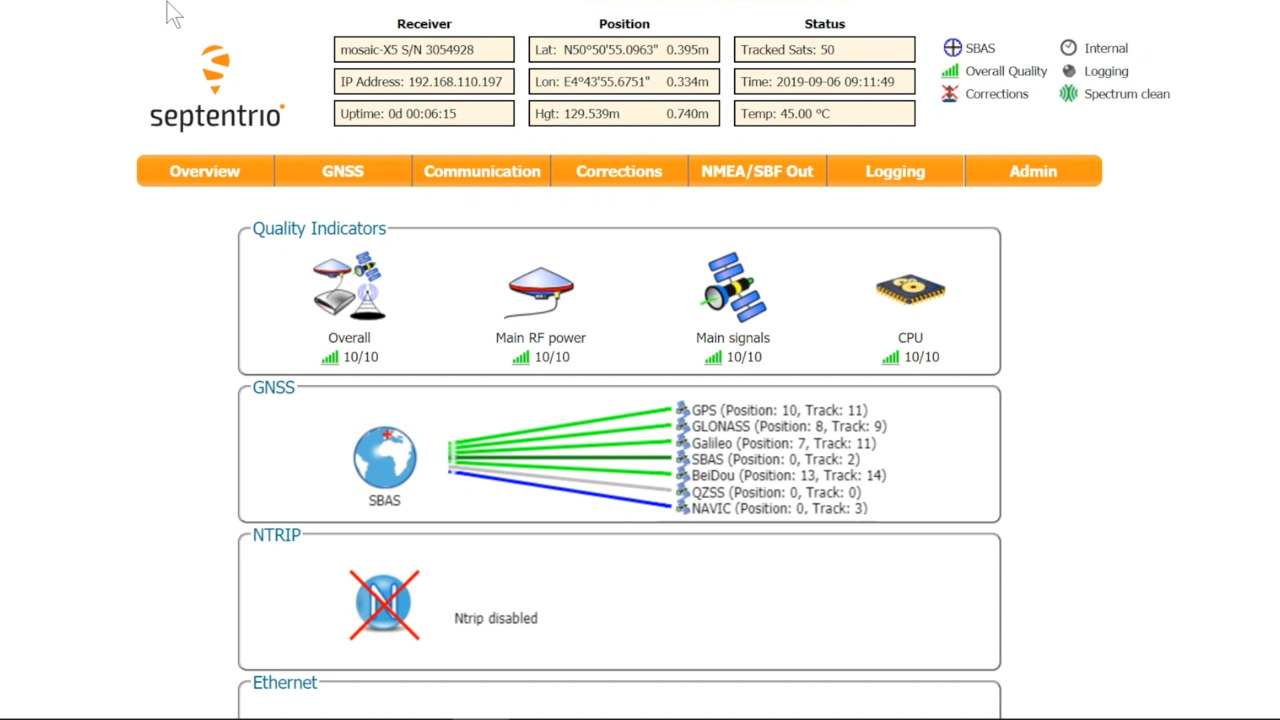
 Figure 5 : Les concepteurs peuvent créer un prototype à l'aide du kit de développement mosaic-X5 410331P3161 en utilisant diverses connexions, notamment Ethernet, ports COM ou USB 2.0, ou en utilisant une carte mémoire SD. (Source de l'image : Septentrio)
Figure 5 : Les concepteurs peuvent créer un prototype à l'aide du kit de développement mosaic-X5 410331P3161 en utilisant diverses connexions, notamment Ethernet, ports COM ou USB 2.0, ou en utilisant une carte mémoire SD. (Source de l'image : Septentrio)
Le kit tire parti de l'interface utilisateur Web intuitive du mosaic-X5 pour un fonctionnement et une surveillance aisés, permettant aux concepteurs de contrôler le module récepteur depuis tout ordinateur ou dispositif mobile. L'interface Web utilise des indicateurs de qualité faciles à lire afin de surveiller le fonctionnement du récepteur.
Les concepteurs peuvent créer un prototype en intégrant le kit de développement mosaic à l'aide de l'une des connexions suivantes : Ethernet, ports COM, USB 2.0, carte mémoire SD.
Module GNSS avec antenne intégrée
Pour les concepteurs d'applications qui peuvent bénéficier de l'utilisation d'un module GNSS avec antenne intégrée, Würth Elektronik propose le module Erinome-I 2614011037000 avec un système sur puce (SoC) hautes performances (Figure 6). Le module prend en charge les constellations GNSS GPS, GLONASS, Galileo et BeiDou, et il est fourni avec une antenne intégrée qui simplifie l'intégration matérielle et réduit les délais de commercialisation. Le module, avec l'antenne intégrée, mesure 18 mm x 18 mm.
 Figure 6 : L'Erinome-I 2614011037000 est un module GNSS complet avec un SoC GNSS hautes performances et une antenne intégrée. (Source de l'image : Würth Elektronik)
Figure 6 : L'Erinome-I 2614011037000 est un module GNSS complet avec un SoC GNSS hautes performances et une antenne intégrée. (Source de l'image : Würth Elektronik)
Le module comprend également un TCXO, un filtre RF, un amplificateur à faible bruit (LNA) et une mémoire Flash série.
Würth propose également la carte d'évaluation (EVB) 2614019037001 pour l'Erinome-I (Figure 7). La carte d'évaluation peut également servir de conception de référence pour l'intégration du module GNSS dans une application. Un port USB peut être utilisé pour connecter la carte d'évaluation à un PC. Un connecteur multibroche permet aux concepteurs d'accéder à toutes les broches du module GNSS.
 Figure 7 : La carte d'évaluation 2614019037001 pour l'Erinome-I (au milieu de la carte, avec l'antenne intégrée visible au centre du module) sert également de conception de référence. (Source de l'image : Würth Elektronik)
Figure 7 : La carte d'évaluation 2614019037001 pour l'Erinome-I (au milieu de la carte, avec l'antenne intégrée visible au centre du module) sert également de conception de référence. (Source de l'image : Würth Elektronik)
Le logiciel Würth Elektronik Navigation and Satellite Software (WENSS) est un outil PC simple permettant d'interagir avec le module GNSS Erinome-I via l'interface UART. Il prend en charge les fonctions suivantes :
- Contrôle du fonctionnement de la carte d'évaluation
- Communication bidirectionnelle avec le module Erinome-I
- Évaluation des fonctionnalités et des capacités de l'Erinome-I
- Familiarisation avec les protocoles, les phrases et les commandes de l'Erinome-I
- Configuration de l'Erinome-I sans connaissance des protocoles
- Parsing des phrases et des commandes utilisées par l'Erinome-I
Le logiciel WENSS permet d'évaluer facilement les applications de positionnement sans connaissances particulières. Les développeurs expérimentés peuvent également utiliser le logiciel WENSS pour des configurations plus avancées.
Conclusion
La meilleure façon d'obtenir une capacité de positionnement précise et fiable est d'utiliser plusieurs constellations avec la technologie de correction associée. Il s'agit de systèmes complexes, mais les concepteurs peuvent se tourner vers des modules GNSS pré-conçus, des kits de développement associés et des environnements pour comparer rapidement et efficacement les différentes options disponibles et mettre en œuvre des fonctions et des services basés sur la position.
Lectures recommandées
Avertissement : les opinions, convictions et points de vue exprimés par les divers auteurs et/ou participants au forum sur ce site Web ne reflètent pas nécessairement ceux de DigiKey ni les politiques officielles de la société.