Réduire l'angoisse liée à l'autonomie des véhicules électriques et améliorer la sécurité en utilisant la commande moteur FOC intégrée et des capteurs avancés
Avec la contribution de Rédacteurs nord-américains de DigiKey
2022-01-05
Les concepteurs de systèmes de véhicules électriques (VE) et de véhicules électriques hybrides (VEH) (souvent appelés xEV) sont soumis à une pression constante pour augmenter le nombre de kilomètres par charge afin de réduire l'angoisse liée à l'autonomie et diminuer l'empreinte carbone des véhicules. Dans le même temps, ils doivent ajouter davantage de moteurs, de capteurs, d'électronique associée, de processeurs et de logiciels pour atteindre des niveaux plus élevés d'autonomie, de fonctionnalités utilisateur et de sécurité, tout en réduisant les coûts.
Les moteurs pour les portières, les vitres, les ventilateurs de refroidissement de batterie, les pompes et les ventilateurs de radiateur, et d'autres fonctions, constituent un problème particulièrement épineux car non seulement ils ajoutent du poids, mais ils nécessitent également des algorithmes de commande avancés tels que le contrôle vectoriel (FOC) pour minimiser le bruit et la consommation d'énergie, tout en assurant une réponse fluide. La conception système globale est compliquée par la nécessité de répondre également aux exigences de sécurité fonctionnelle ISO 26262 et aux normes de qualité AEC-Q100.
Pour relever ces défis, les concepteurs peuvent se tourner vers une variété de dispositifs qualifiés automobiles qui offrent des niveaux supérieurs de matériel et de logiciel et simplifient la conception et l'intégration de diverses fonctions, tout en réduisant le nombre de pièces et l'empreinte globale.
Cet article traite des problèmes auxquels sont confrontés les concepteurs de véhicules électriques et de véhicules électriques hybrides. Il montre ensuite comment utiliser un contrôleur de moteur à courant continu sans balais (BLDC) FOC hautement intégré et une carte d'évaluation associée pour lancer la conception d'un moteur efficace pour les véhicules électriques/électriques hybrides. Il présente également divers capteurs pour surveiller le courant, la position 3D, la vitesse et la direction, tous provenant d'une seule source, Allegro MicroSystems.
Problèmes de coût, de sécurité et d'angoisse liée à l'autonomie des véhicules électriques
Les concepteurs de véhicules électriques hybrides doivent faire face à de nombreux problèmes, notamment le coût, la sécurité et la fiabilité des véhicules — en particulier compte tenu des niveaux croissants d'autonomie des véhicules, d'autonomie de conduite par charge (angoisse liée à l'autonomie) et de durée de vie des batteries.
Pour garantir la sécurité et la fiabilité, il faut des capteurs avancés qui répondent aux exigences des fonctions des systèmes d'aide à la conduite (ADAS) telles que définies dans la norme ISO 26262. Pour des raisons de coût et d'autonomie, les concepteurs se sont tournés vers des rails d'alimentation à plus haute tension, jusqu'à 800 volts (V), pour un meilleur rendement et un câblage plus léger, tout en tirant parti des améliorations apportées à la conception des blocs-batteries.
Par exemple, une meilleure gestion thermique des batteries permet d'augmenter l'autonomie de conduite et la durée de vie des batteries, tandis qu'un meilleur refroidissement des onduleurs de traction pour les véhicules électriques et électriques hybrides contribue à augmenter la densité de puissance et d'énergie et à réduire le poids.
Alors que les niveaux plus élevés d'intégration des dispositifs à semi-conducteurs permettent un plus grand nombre de fonctionnalités tout en réduisant le poids et l'espace, les moteurs BLDC requis pour les ventilateurs doivent être étroitement contrôlés pour optimiser le rendement. Pour ce faire, il est utile d'inclure des algorithmes avancés de commande moteur, comme le contrôle vectoriel, sur le circuit d'attaque de grille du contrôleur moteur.
Refroidissement hautes performances
Le contrôle FOC permet le fonctionnement régulier des moteurs électriques sur toute leur plage de vitesses, et il peut générer un couple complet au démarrage. De plus, le contrôle FOC peut fournir une accélération et une décélération rapides et fluides du moteur, une caractéristique utile pour un contrôle précis dans les applications de mouvement hautes performances. Le contrôle FOC peut être utilisé pour développer des circuits d'attaque basse tension (50 VCC et moins) compacts, silencieux et haut rendement, pour une gamme de moteurs BLDC hautes performances jusqu'à 500 watts (W). Ils sont typiquement utilisés dans les ventilateurs de refroidissement des batteries haute tension des xEV, ainsi que dans les ventilateurs soufflants des systèmes de chauffage, ventilation et climatisation (CVC) et les pompes hydrauliques pour les systèmes de refroidissement des onduleurs de traction haute tension (Figure 1).
") Figure 1 : Les contrôleurs de moteur FOC peuvent utiliser l'alimentation batterie basse tension pour refroidir les batteries haute tension et les onduleurs de traction haute tension des xEV. (Source de l'image : Allegro MicroSystems)
Figure 1 : Les contrôleurs de moteur FOC peuvent utiliser l'alimentation batterie basse tension pour refroidir les batteries haute tension et les onduleurs de traction haute tension des xEV. (Source de l'image : Allegro MicroSystems)
Dans les conceptions classiques, le contrôle FOC est implémenté avec des capteurs externes utilisant un microcontrôleur. Appelées FOC direct, ces conceptions peuvent s'avérer complexes, et elles ont tendance à souffrir d'une réponse dynamique réduite en raison de leur dépendance aux capteurs externes pour mesurer les paramètres de fonctionnement du moteur.
L'élimination des capteurs externes permet d'améliorer les performances et de réduire les coûts du contrôle FOC.
Les informations des capteurs manquants sont toujours nécessaires pour implémenter le contrôle FOC et peuvent être extraites des tensions et des courants aux bornes du moteur à partir de la force contre-électromotrice (FCEM) dans les enroulements du moteur. Si le matériel est plus simple, la mise en œuvre du contrôle FOC sans capteur requiert un logiciel de contrôle plus complexe.
Un algorithme FOC sans capteur peut permettre un rendement et une réponse dynamique maximum tout en minimisant le bruit acoustique. Il fournit également un démarrage en boucle ouverte robuste lorsque le moteur est à l'arrêt et qu'aucune information FCEM n'est disponible.
Contrôle FOC aisé pour les ventilateurs et les pompes automobiles
Alors que la plupart des circuits d'attaque BLDC FOC nécessitent que les développeurs de logiciels écrivent et portent l'algorithme vers un microprocesseur ou un microcontrôleur, l'A89307KETSR-J d'Allegro MicroSystems intègre l'algorithme FOC sans capteur directement dans le circuit d'attaque de grille. Avec seulement cinq composants passifs externes (quatre condensateurs et une résistance), l'A89307KETSR-J minimise également la nomenclature (BOM), améliore la fiabilité et réduit la complexité de conception (Figure 2).
") Figure 2 : Un circuit d'application de ventilateur de refroidissement de bloc-batterie xEV A89307KETSR-J typique montre les cinq composants externes : quatre condensateurs et une résistance. (Source de l'image : Allegro MicroSystems)
Figure 2 : Un circuit d'application de ventilateur de refroidissement de bloc-batterie xEV A89307KETSR-J typique montre les cinq composants externes : quatre condensateurs et une résistance. (Source de l'image : Allegro MicroSystems)
Le circuit d'attaque de grille A89307KETSR-J fonctionne de 5,5 à 50 VCC. L'algorithme FOC intégré comprend un couple constant et une puissance constante, ainsi que des modes de fonctionnement en boucle ouverte et à vitesse constante. L'A89307KETSR-J inclut des entrées pour la modulation de largeur d'impulsion (PWM) ou la commande de vitesse en mode horloge, le freinage et la direction, ainsi que des signaux de sortie pour les conditions de défaut et la vitesse du moteur (Figure 3).
") Figure 3 : Le schéma fonctionnel interne de l'A89307KETSR-J montre le contrôleur FOC (au centre), la commande de vitesse en mode PWM ou horloge (SPD), les entrées de freinage (BRAKE) et de direction (DIR) (à gauche), et les sorties de défaut (FAULT) et de vitesse moteur (FG) (également à gauche). (Image : Allegro MicroSystems)
Figure 3 : Le schéma fonctionnel interne de l'A89307KETSR-J montre le contrôleur FOC (au centre), la commande de vitesse en mode PWM ou horloge (SPD), les entrées de freinage (BRAKE) et de direction (DIR) (à gauche), et les sorties de défaut (FAULT) et de vitesse moteur (FG) (également à gauche). (Image : Allegro MicroSystems)
L'A89307KETSR-J est optimisé pour commander des MOSFET de puissance à canal N externes à faible résistance à l'état passant. Il peut fournir les importants courants d'attaque de crête requis pour activer et désactiver rapidement les MOSFET afin de minimiser la dissipation de puissance pendant la commutation, ce qui améliore le rendement opérationnel et réduit les problèmes de gestion thermique. Plusieurs niveaux d'attaque de grille sont disponibles, ce qui permet aux concepteurs d'optimiser le compromis entre rendement et émissions d'interférences électromagnétiques (EMI). L'activation rapide des MOSFET réduit les pertes de commutation mais augmente les EMI, tandis que l'activation plus lente des MOSFET réduit les EMI mais augmente les pertes de commutation et diminue le rendement.
La vitesse du moteur peut être contrôlée par une entrée PWM, analogique ou CLOCK. Le contrôle de la vitesse en boucle fermée est une option, avec un rapport tours par minute (RPM) - fréquence d'horloge programmable. La commande de démarrage sans capteur inclut la détection de pré-rotation directe et inverse et la synchronisation, permettant à l'A89307KETSR-J de fonctionner sur un large éventail de configurations de moteurs et de charges.
L'algorithme de démarrage non inverse d'Allegro MicroSystems améliore également les performances de démarrage. Le moteur démarre dans la direction correcte après la mise sous tension sans secousses ni vibrations inverses. La fonction Soft-On-Soft-Off augmente progressivement le courant vers le moteur avec la commande "on" et réduit progressivement le courant depuis le moteur avec la commande "off", réduisant davantage le bruit acoustique (Figure 4).
 Figure 4 : Les formes d'ondes de courant de l'A89307KETSR-J pour Soft-On (en haut) et Soft-Off (en bas) se traduisent par un fonctionnement régulier du moteur et un bruit acoustique réduit. (Source de l'image : Allegro MicroSystems)
Figure 4 : Les formes d'ondes de courant de l'A89307KETSR-J pour Soft-On (en haut) et Soft-Off (en bas) se traduisent par un fonctionnement régulier du moteur et un bruit acoustique réduit. (Source de l'image : Allegro MicroSystems)
L'A89307KETSR-J est dotée d'une interface I2C permettant de définir le courant nominal, la tension, la vitesse, la résistance et le profil de démarrage du moteur. L'interface I2C met également en œuvre la commande de marche/arrêt et de vitesse, ainsi que les signaux d'erreur et de retour de vitesse.
Carte d'évaluation FOC sans capteur
Les concepteurs peuvent utiliser la carte d'évaluation APEK89307KET-01-T-DK et le logiciel associé pour accélérer le développement de commandes de moteur BLDC basées FOC avec l'A89307KETSR-J (Figure 5). Cette carte inclut l'A89307KETSR-J avec accès à toutes les broches d'entrée et de sortie ainsi qu'un étage de puissance triphasé complet pour commander un moteur BLDC. Les concepteurs peuvent sélectionner les paramètres de commande FOC à l'aide d'une interface utilisateur graphique (GUI) simple et les charger en mémoire EEPROM intégrée. La nomenclature minimale de l'A89307KETSR-J permet la conception de commandes qui s'intègrent dans le logement du moteur, ce qui réduit davantage la taille de la solution.
 Figure 5 : La carte d'évaluation APEK89307KET-01-T-DK inclut l'A89307KETSR-J (U1, centre gauche de la carte) et six MOSFET de puissance (à droite) pour commander un moteur BLDC. (Source de l'image : Allegro MicroSystems)
Figure 5 : La carte d'évaluation APEK89307KET-01-T-DK inclut l'A89307KETSR-J (U1, centre gauche de la carte) et six MOSFET de puissance (à droite) pour commander un moteur BLDC. (Source de l'image : Allegro MicroSystems)
Capteurs pour systèmes ADAS
Afin d'implémenter des fonctions ADAS compactes et rentables, les concepteurs de systèmes xEV doivent détecter les niveaux de courant dans les commandes de moteur, les convertisseurs CC/CC et les onduleurs, ainsi que la position rotative des papillons et des cylindres, et la vitesse et la direction des engrenages dans les transmissions. Allegro MicroSystems propose une variété de solutions de capteurs pour les systèmes ADAS, notamment :
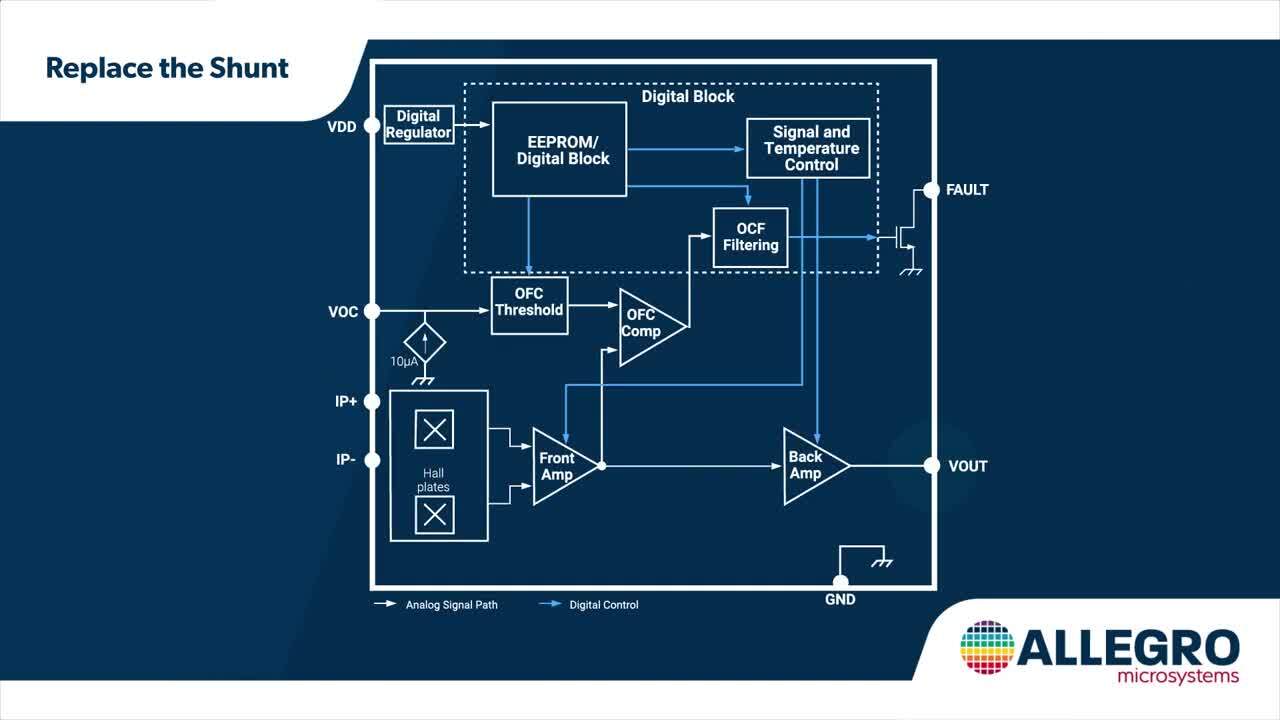
Détection de courant : L'ACS72981KLRATR-150B3 fournit aux concepteurs une détection du courant CA ou CC économique et précise. Ce capteur de courant à effet Hall linéaire haute précision a une bande passante de 250 kilohertz (kHz) et est conçu pour être utilisé dans la commande de moteurs, la commande de convertisseurs CC/CC, la commande d'onduleurs, et la détection et la gestion de charge. Il s'agit d'un circuit intégré qualifié AEC-Q100 dont le temps de réponse est < 2 microsecondes (µs), permettant de répondre aux besoins de détection rapide des défauts de surintensité dans les applications à sécurité critique.
Détection de position 3D : La détection de position magnétique 3D linéaire et rotative sans contact pour la détection de la position de papillon, de soupape, de cylindre et de transmission peut être rapidement implémentée en utilisant le circuit intégré 3DMAG A31315LOLATR-XY-S-SE-10 d'Allegro MicroSystems. Le dispositif peut mesurer le mouvement rotatif sur le plan horizontal et le plan vertical, et mesurer le mouvement linéaire d'un côté à l'autre ou d'avant en arrière (Figure 6).
 Figure 6 : Le capteur de position 3D A31315LOLATR-XY-S-SE-10 peut mesurer un mouvement rotatif sur le plan horizontal et le plan vertical, et mesurer un mouvement linéaire d'un côté à l'autre ou d'avant en arrière. (Source de l'image : Allegro MicroSystems)
Figure 6 : Le capteur de position 3D A31315LOLATR-XY-S-SE-10 peut mesurer un mouvement rotatif sur le plan horizontal et le plan vertical, et mesurer un mouvement linéaire d'un côté à l'autre ou d'avant en arrière. (Source de l'image : Allegro MicroSystems)
Le capteur A31315LOLATR-XY-S-SE-10 permet aux concepteurs de choisir entre des formats de sortie ratiométriques analogiques, PWM ou SAE J2716 SENT (Single Edge Nibble Transmission). Il a été développé pour répondre à la norme ISO 26262 ASIL B (puce unique, en boîtier SOIC-8) et ASIL D (puce double redondante, en boîtier TSSOP-14) dans les systèmes automobiles liés à la sécurité.
Vitesse et direction : L'ATS19520LSNBTN-RSWHPYU est un capteur de direction et de vitesse de transmission à effet Hall différentiel résistant aux vibrations, avec des modèles disponibles pour la détection de la direction avant et arrière (Figure 7).
 Figure 7 : La variante "F" illustrée de l'ATS19520 mesure la rotation avant lorsqu'une dent d'engrenage passe de la broche 1 à la broche 3 (en haut), et la rotation arrière lorsqu'une dent d'engrenage passe de la broche 3 à la broche 1 (en bas). La variante "R" mesure la rotation dans les directions opposées. (Source de l'image : Allegro MicroSystems)
Figure 7 : La variante "F" illustrée de l'ATS19520 mesure la rotation avant lorsqu'une dent d'engrenage passe de la broche 1 à la broche 3 (en haut), et la rotation arrière lorsqu'une dent d'engrenage passe de la broche 3 à la broche 1 (en bas). La variante "R" mesure la rotation dans les directions opposées. (Source de l'image : Allegro MicroSystems)
Le capteur répertorié ISO 26262 ASIL B est doté d'un système de diagnostic intégré et il convient à une utilisation dans les chaînes de traction des véhicules électriques hybrides. Le boîtier SIP à trois broches inclut un aimant à polarisation inverse intégré pour mesurer la vitesse et la direction des cibles ferreuses en rotation, et un condensateur intégré pour assurer la compatibilité électromagnétique.
Conclusion
Les commandes de moteurs BLDC FOC sans capteur intégrées, ainsi que les capteurs de courant, les capteurs de position magnétique et les capteurs de rotation, sont des composants clés permettant de concevoir des véhicules électriques hybrides efficaces et sûrs, avec une plus grande autonomie et une empreinte carbone réduite. L'utilisation de commandes de moteurs FOC, en particulier, permet de concevoir des systèmes de refroidissement plus efficaces et plus silencieux avec une réponse dynamique améliorée pour les blocs-batteries et les onduleurs de traction. Pour leur part, les capteurs compacts, précis et écoénergétiques sont essentiels au développement de véhicules électriques hybrides répondant aux exigences de fiabilité des systèmes d'aide à la conduite et aux exigences de sécurité fonctionnelle de la norme ISO 26262.
Lectures recommandées
Avertissement : les opinions, convictions et points de vue exprimés par les divers auteurs et/ou participants au forum sur ce site Web ne reflètent pas nécessairement ceux de DigiKey ni les politiques officielles de la société.