

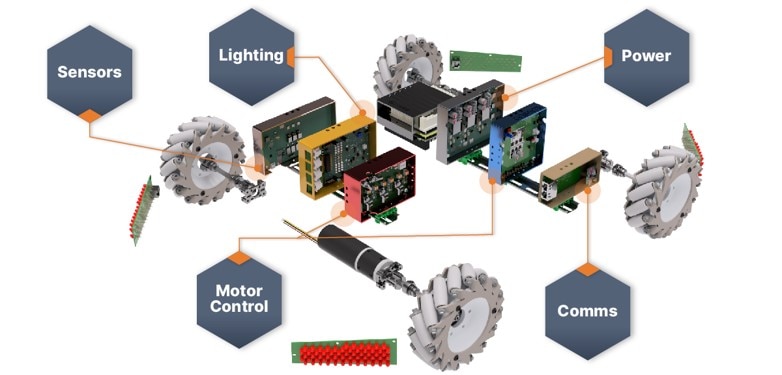
Robot mobile autonome
Le concept de robot mobile autonome d'onsemi constitue une solution robotique complète, conçue avec les solutions innovantes et haut rendement d'onsemi. Ce concept peut être utilisé pour élaborer différents types de robots, cobots, outils électriques et véhicules guidés autonomes en associant différentes solutions intelligentes et électriques d'onsemi.
- Kits de commande de moteurs CC sans balais (BLDC)
- Charge de batterie et conversion de puissance
- Capteurs d'images et solutions lidar
- Solutions de connectivité
- Éclairage LED
- Cobots et robots industriels
- Robots d'entrepôt
- Robots de livraison
- Outils électriques
- Robots agricoles
- Tondeuses
- Véhicules guidés autonomes

Vidéo sur les robots mobiles autonomes -

Entretien Embedded World 2024 -

Parlons technique : IA physique et robotique -
- Solutions de commande moteur CC sans balais (BLDC)
- Solutions de détection
- Solutions d'alimentation
- Solutions d'éclairage
- Solutions de communication
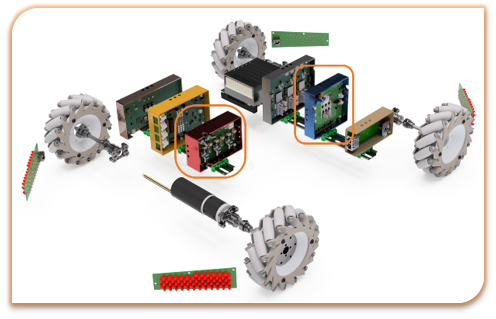
Solutions de commande moteur CC sans balais (BLDC)
Nous disposons tout d'abord d'une solution de commande moteur CC sans balais, pour laquelle nous pouvons choisir trois plateformes différentes. La première est notre plateforme de développement de moteur intégré, basée sur ecoSpin. Il s'agit d'une solution entièrement intégrée pour la commande de moteurs CC sans balais. Elle intègre des diodes de démarrage. Ainsi qu'un amplificateur de détection, un circuit d'attaque de grille et un microcontrôleur. Le micrologiciel est disponible.
La deuxième solution est le système basé sur Xilinx qui utilise des circuits d'attaque de grille discrets et des MOSFET. Elle peut être utilisée pour les plateformes nécessitant une plus grande puissance de calcul au niveau de la commande moteur.
Enfin, nous disposons d'une solution basée sur des outils électriques.
Produits phares

NCD83591MNTXG
Afficher les détails
NVMFS5C410NWFAFT1G
Afficher les détails
NCP730BMT250TBG
Afficher les détails
NCH-RSL15-512-101Q40-ACG
Afficher les détails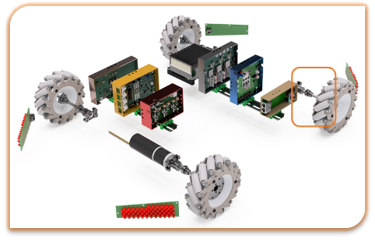
Solutions de détection
Le robot autonome a besoin de voir où il va : il a donc besoin d'un capteur d'image et d'un module de caméra. Notre démonstration utilise un module de caméra USB E-con. Celui-ci est équipé d'un capteur d'image à obturateur global, parfait pour les robots autonomes. Les capteurs à obturateur global stockent les données des pixels de chaque image en même temps. Ces types de capteurs ne présentent pas d'artefacts de mouvement, comme c'est le cas avec les capteurs à obturateur roulant. Ils conviennent donc parfaitement aux déplacements dans les usines ou les entrepôts. Les capteurs à obturateur roulant possèdent une plage dynamique plus élevée que les capteurs à obturateur global, ce qui leur permet de mieux fonctionner en cas de différences extrêmes dans les conditions d'éclairage. Cependant, pour les robots autonomes intervenant dans les usines, les conditions d'éclairage sont adaptées afin de permettre l'utilisation de capteurs à obturateur global. Le capteur d'image AR0234CS prend en charge les images Full HD à une fréquence de soixante images par seconde.
Les robots autonomes dotés de bras mobiles recourent à des servomoteurs pour contrôler la position des bras et des pinces. Cela nécessite des informations précises sur la position. De plus, si le robot autonome est mis hors tension puis remis sous tension, il est important de connaître la position exacte du bras. Un capteur de position absolue est capable de déterminer la position du bras à tout moment. Les capteurs optiques peuvent remplir cette fonction, mais ils nécessitent de nombreux composants externes et sont sensibles aux variations de température. Onsemi est un fournisseur reconnu de capteurs de position personnalisés de haute fiabilité pour le marché automobile. Forts de cette expérience, nous avons développé une solution de capteur de position inductif double qui utilise le contrôleur de capteur NCS32100. Je reviendrai plus en détail sur ce produit un peu plus tard dans cette présentation.
Produits phares

AR0234CSSM00SUKA0-CR
Afficher les détails
AR1335CSSM11SMKA0-CP
Afficher les détails
AR0822NPSC10SMTA0-DR
Afficher les détails
NCS32100XMNTTXG
Afficher les détails
NCV75215DB001R2G
Afficher les détails
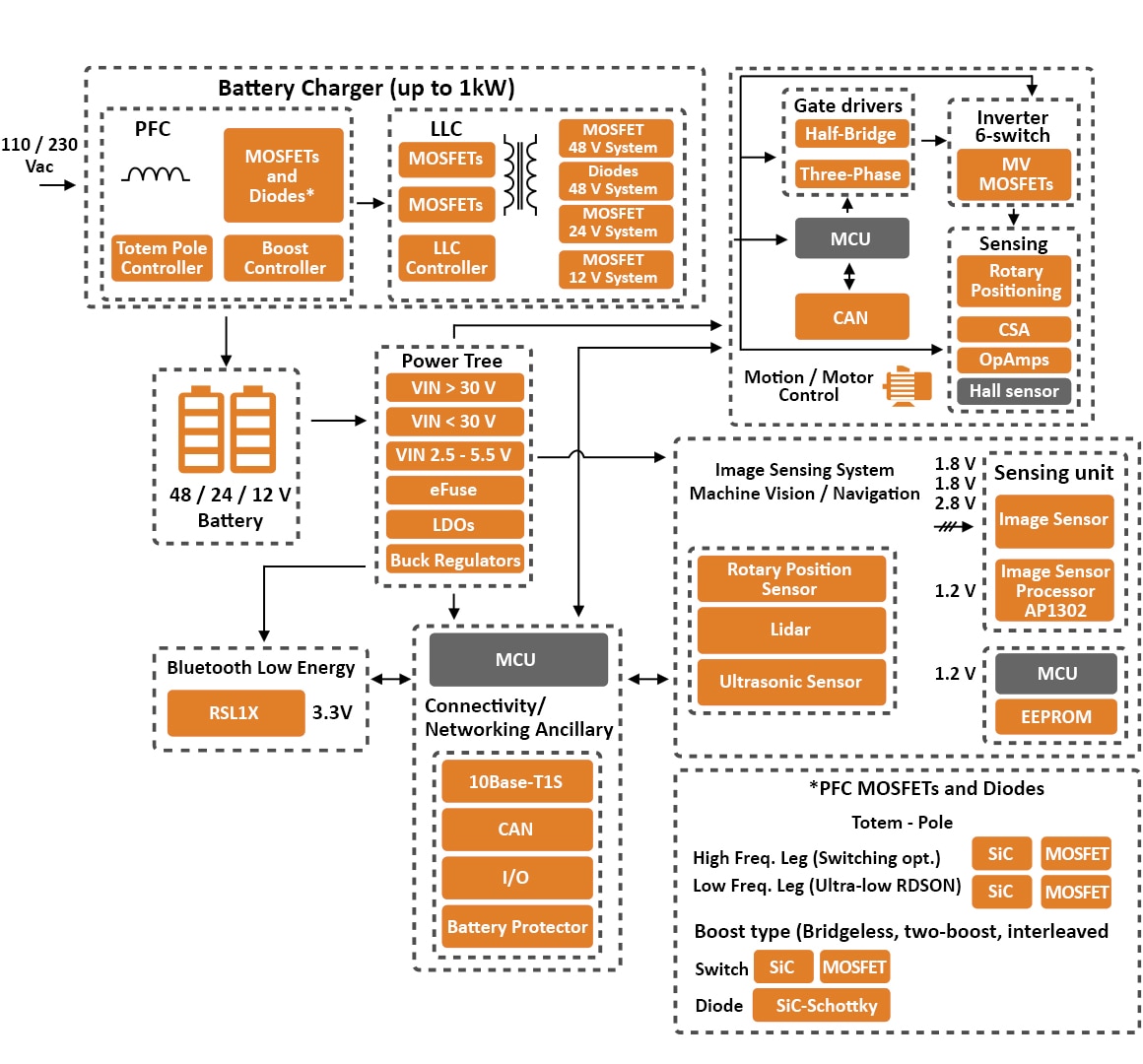
Solutions d'alimentation
Intéressons-nous maintenant à l'alimentation du robot autonome. Il fonctionne certes sur batterie, mais celle-ci doit être rechargée à un moment ou à un autre. Le robot autonome dispose de l'intelligence nécessaire pour se rendre à la borne de recharge électrique. Un bras robotique externe connecte le câble d'alimentation au robot autonome pour le recharger.
Le chargeur de batterie à entrée secteur de 600 W pour le robot autonome se compose de trois sections : un étage PFC, un convertisseur LLC isolé et un convertisseur abaisseur. L'étage PFC est un étage PFC à double entrelacement utilisant le contrôleur PFC NCP1632. Cela garantit que la puissance tirée de la ligne CA présente un facteur de puissance satisfaisant et une faible distorsion harmonique totale. L'étage LLC convertit la sortie de l'étage PFC, qui est d'environ 400 V CC, en une tension de sortie de 48 V CC en utilisant une topologie LLC avec une topologie en demi-pont à prise centrale. Le NCP1399 est utilisé dans la conception actuelle, tandis que le NCP13994, plus avancé, est recommandé pour les conceptions plus récentes. La sortie est redressée de manière synchrone à l'aide de deux MOSFET moyenne tension FDMS86202ET commandés par deux contrôleurs de redressement synchrone NCP4305D.
Les profils de charge de batterie incluent des modes de charge à courant constant qui permettent d'obtenir une large plage de tensions de fonctionnement. Les étages LLC affichent une plage de fonctionnement étroite pour leur rapport de conversion de tension, ou gain, et ne fonctionnent donc pas convenablement en mode de courant constant. Dans le chargeur de robot autonome, il existe un troisième étage abaisseur utilisant le FAN65008 qui peut fonctionner avec une très large gamme de rapports de conversion de tension et peut donc facilement fournir les profils de courant et de tension requis pour la charge de la batterie.
Produits phares

NCP1681ABD2R2G
Afficher les détails, 10-DFN (4x4)")
NCP51530BMNTWG
Afficher les détails
NCP51561BADWR2G
Afficher les détails 291 W (Tc) TO-247-3 traversant")
NTHL045N065SC1
Afficher les détails
NCP13994AADR2G
Afficher les détails
NCP51561BADWR2G
Afficher les détails
NTHL045N065SC1
Afficher les détails
NCP4318ALSDR2G
Afficher les détails
NCP1076STAT3G
Afficher les détails
FAN65008B
Afficher les détails
FODM1008
Afficher les détails, 102 A (Tc) 3,3 W (Ta), 187 W (Tc) 8-PQFN (5x6) à montage en surface")
FDMS86202ET120
Afficher les détails
RSL15
Afficher les détails
Solutions d'éclairage
Notre solution de robot autonome est équipée de voyants LED pour signaler sa présence aux humains et aux autres robots. Des voyants LED supplémentaires sont utilisés pour la signalisation. Onsemi est un fournisseur de longue date de solutions de phares, de feux arrière, de feux de jour et de feux de signalisation pour le marché de l'automobile et des véhicules industriels. Nous avons sélectionné deux produits de ce large portefeuille pour les utiliser dans notre robot autonome.
La solution NCV7685 pour feux arrière LED automobiles constitue une solution simple à utiliser, composée d'un circuit d'attaque et d'un MOSFET intégré. Il existe 12 canaux parallèles de 60 mA contrôlés par PWM via une interface I2C. Si le concepteur souhaite faire fonctionner le circuit d'attaque LED sans microcontrôleur externe, il peut préprogrammer des registres OTP spécifiques afin de définir le rapport cyclique. Le circuit d'attaque LED dispose d'un système de diagnostics de panne qui peut être consulté par le microcontrôleur pour détecter des erreurs spécifiques telles que des conditions de court-circuit sur la broche réglant le courant, une erreur dans la communication I2C, un avertissement thermique, un blocage thermique et des conditions de charge ouverte. Ces informations peuvent être utilisées par le microcontrôleur afin de prendre les actions correctives nécessaires, telles que la communication de l'erreur à un contrôleur hôte central qui surveille les robots autonomes locaux.
Produits phares

NCV7685DQR2G
Afficher les détails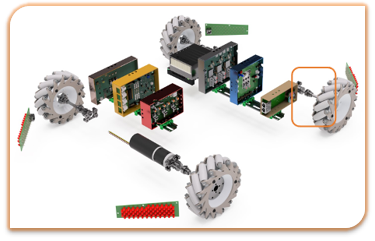
Solutions de communication
Traditionnellement, les fournisseurs de robotique choisissaient le protocole CAN automobile pour la communication filaire entre différents nœuds du robot, notamment BLDC, éclairage, processeur et certains capteurs. Le CAN existe depuis des décennies et utilise un câblage à paires torsadées non blindées (UTP) léger et peu coûteux dans une topologie multipoint ou en chaîne, facilitant ainsi la communication de 2 Mbps à 5 Mbps entre les nœuds. Parallèlement, à mesure que les robots acquièrent davantage d’autonomie ou travaillent en plus étroite harmonie avec les humains, l’intelligence robotique doit être augmentée. L'intelligence robotique est améliorée en ajoutant davantage de traitement et de capteurs au robot, notamment des capteurs Lidar, des capteurs d'image, des ultrasons, des radars et un positionnement inductif. Les capteurs d'image et le Lidar génèrent davantage de liaisons de communication point à point (p2p) vers le nœud du processeur, nécessitant des débits de données plus rapides comme Gigabit Ethernet. L’un des inconvénients du CAN est le besoin d’une passerelle entre Ethernet et CAN, en raison des différences de protocoles.
En 2019, l'Ethernet Alliance a ratifié la norme IEEE802.3cg pour 10BASE-T1S, en tant que remplacement CAN « All-Ethernet ». Désormais, avec 10BASE-T1S, vous pouvez communiquer 2 à 3 fois plus rapidement que CAN sur les mêmes deux fils (SPE : Single Pair Ethernet) et renoncer au coût et au poids supplémentaires de la passerelle en utilisant les contrôleurs NCN26010 ou NCN26000 d'onsemi.
Produits phares

NCN26010
Afficher les détails
NCN26000
Afficher les détails
NCV7340
Afficher les détails
NCV7342
Afficher les détails
NCV7343
Afficher les détails
NCV7344
Afficher les détails
NCV7349
Afficher les détails
NCV7351
Afficher les détails
NCV7356
Afficher les détails
NCV7357
Afficher les détails
NCV7390
Afficher les détails
NCV7446
Afficher les détails
NCV7450
Afficher les détails

