Schnelle Implementierung von GNSS-Modulen mit mehreren Konstellationen zur Positionsbestimmung
Zur Verfügung gestellt von Nordamerikanische Fachredakteure von DigiKey
2021-09-09
Die Nutzung von positionsbasierten Funktionen unter Verwendung von GNSS-Empfängern (Global Navigation Satellite System) mit mehreren Konstellationen für das europäische Galileo, das US-amerikanische Global Positioning System (GPS), das russische GLONASS, das chinesische BeiDou-Navigationssatellitensystem und das japanische QZSS nimmt in einer Reihe von Anwendungen zu, darunter Robotik, autonome Fahrzeuge, Industrieautomatisierung, Logistik und Anlagenverfolgung, Drohnen sowie landwirtschaftliche und schwere Baumaschinen. Zu den Vorteilen der Verwendung von GNSS-Empfängern mit mehreren Konstellationen gehören eine bessere Verfügbarkeit der Positions-, Navigations- und Zeitsignale (PNT-Signale), eine höhere Genauigkeit und Integrität sowie eine verbesserte Robustheit der Anwendung.
Die Entwicklung von Mehrkonstellationsempfängern ist jedoch eine komplexe und zeitaufwändige Tätigkeit, die Folgendes umfasst: Optimierung der L-Band-Antenne, Entwurf des Hochfrequenz-Frontends, Integration der Algorithmen zur Signalverarbeitung im Basisband, um die verschiedenen PNT-Signale zu erfassen, zu verfolgen und zu korrigieren, Codierung der Verarbeitungssoftware der Anwendung, um die PNT-Daten aus jedem Kanal des Basisbands zu extrahieren und die Informationen zur Umsetzung der Systemfunktionen zu verwenden. Die Planer müssen auch eine geeignete Antenne auswählen und sie richtig platzieren.
Als Alternative können Konstrukteure auf vorgefertigte GNSS-Module und Entwicklungsumgebungen zurückgreifen, um schnell und effizient Positionsbestimmungsfunktionen in ein System zu integrieren. Diese GNSS-Module umfassen das HF-Frontend, die Basisbandverarbeitung und die eingebettete Firmware, um die Entwicklung von Anwendungssoftware zu beschleunigen. Einige GNSS-Module enthalten auch die Antennen.
Dieser Artikel gibt einen Überblick über die Grundlagen von GNSS, PNT und den Betrieb von GNSS-Empfängern mit mehreren Konstellationen. Anschließend wird auf die Vor- und Nachteile der Integration von Antennen in GNSS-Module eingegangen, bevor verschiedene GNSS-Module - mit und ohne integrierte Antennen - sowie die dazugehörigen Evaluierungsboards von STMicroelectronics, Septentrio und Würth Elektronik vorgestellt werden, die Entwickler für die effiziente und kostengünstige Entwicklung genauer und robuster positionsbasierter Anwendungen einsetzen können.
Was sind GNSS und PNT?
GNSS und PNT sind eng miteinander verbundene Konzepte. GNSS-Satelliten sind die häufigste Quelle für PNT-Signale. GNSS-Satelliten sind im Wesentlichen hochgenaue synchronisierte Uhren, die ihre PNT-Informationen ständig ausstrahlen. Ein GNSS-Modul empfängt PNT-Signale von einem bestimmten Satelliten und berechnet seine Entfernung zu diesem Satelliten. Wenn der Empfänger die Entfernung zu mindestens vier Satelliten kennt, kann er seine eigene Position schätzen. Die Genauigkeit der Positionsbestimmung wird jedoch durch eine Vielzahl von Fehlerquellen beeinträchtigt, u. a:
- Taktdrift der Zeitmessungsschaltungen in GNSS-Satelliten
- Ungenauigkeiten bei der Vorhersage der genauen Orbitalposition von GNSS-Satelliten
- Allgemeine Leistungsdrift der gesamten Satellitenausrüstung im Vergleich zu anderen Satelliten, auch bekannt als Satellitenverzerrungen
- Verzerrungen und Verzögerungen bei der Signalübertragung auf dem Weg durch die Ionosphäre und Troposphäre.
- Mehrweg-Reflexion und variable Leistung und Drift im Empfänger
Den Konstrukteuren stehen verschiedene Techniken zur Verfügung, um satellitengestützte und atmosphärische GNSS-Fehler zu korrigieren.
Verbesserung der GNSS-Leistung
Der beste Weg, die Auswirkungen von Fehlern, die vom GNSS-Empfänger ausgehen, zu minimieren, besteht darin, den leistungsfähigsten Empfänger zu verwenden, der den Kosten- und Größenbeschränkungen einer bestimmten Anwendung entspricht. Aber auch Hochleistungsempfänger sind nicht perfekt; ihre Leistung kann sehr wahrscheinlich verbessert werden. Es ist wichtig, diese Korrekturmethoden zu verstehen, da sie unterschiedlich leistungsfähig sind und einige GNSS-Module nicht in der Lage sind, alle von ihnen zu implementieren.
Bodengestützte Referenzstationen werden von mehreren GNSS-Korrekturverfahren verwendet (Abbildung 1). Die gängigsten Methoden für die Verwendung von bodengestützten Referenzstationen zur Bereitstellung von GNSS-Korrekturen für Empfänger sind die Echtzeit-Kinematik (RTK) und die präzise Punktpositionierung (PPP). In jüngster Zeit sind auch hybride RTK-PPP-Methoden verfügbar geworden.
 Abbildung 1: Ein GNSS-Benutzerempfänger kann Informationen über Atmosphären-, Takt- und Bahnfehler von einem Referenznetzwerk erhalten, um die Positionsgenauigkeit zu verbessern. (Bildquelle: Septentrio)
Abbildung 1: Ein GNSS-Benutzerempfänger kann Informationen über Atmosphären-, Takt- und Bahnfehler von einem Referenznetzwerk erhalten, um die Positionsgenauigkeit zu verbessern. (Bildquelle: Septentrio)
RTK stützt sich auf eine einzige Basisstation oder ein lokales Referenznetz für Korrekturdaten, die die meisten GNSS-Fehler eliminieren können. Bei RTK wird davon ausgegangen, dass die Basisstation und der Empfänger nahe beieinander liegen, d. h. maximal 40 km voneinander entfernt sind, so dass sie die gleichen Fehler aufweisen. Post-Processed Kinematic (PPK) ist eine Variante von RTK und wird häufig in der Vermessung und Kartierung eingesetzt, um hochpräzise Positionsdaten oder Genauigkeit im Zentimeterbereich zu erhalten.
Für die PPP-Korrekturen werden nur Fehler in der Umlaufbahn und der Satellitenuhr verwendet. Diese satellitenspezifischen Fehler sind unabhängig vom Standort des Nutzers, wodurch die Anzahl der benötigten Referenzstationen begrenzt wird. PPP berücksichtigt jedoch keine atmosphärenbedingten Fehler und hat daher eine geringere Genauigkeit als RTK. Darüber hinaus können PPP-Korrekturen Initialisierungszeiten von etwa 20 Minuten haben. Die längere Initialisierungszeit und die geringere Genauigkeit machen PPP für viele Anwendungen unpraktisch.
Für Anwendungen, die eine annähernde RTK-Genauigkeit und kurze Initialisierungszeiten erfordern, wird häufig der neueste GNSS-Korrekturdienst RTK-PPP (manchmal auch als State-Space-Representation (SSR) bezeichnet) eingesetzt. Es verwendet ein Referenznetzwerk mit Stationen, die etwa 100 km voneinander entfernt sind, die GNSS-Daten sammeln und eine Kombination aus Satelliten- und atmosphärischen Korrekturen berechnen. Das Referenznetz nutzt Internet-, Satelliten- oder Mobilfunknetze, um die Korrekturdaten an die Teilnehmer zu senden. GNSS-Empfänger, die RTK-PPP verwenden, können Genauigkeiten im Subdezimeterbereich erreichen. Die Wahl zwischen RTK-, PPP- und RTK-PPP-Korrekturverfahren bringt eine Reihe von Kompromissen mit sich, die die Entwickler prüfen müssen, um die optimale Lösung für das jeweilige Anwendungsprofil zu finden. (Abbildung 2).
 Abbildung 2: Stärken und Schwächen von drei gängigen GNSS-Korrekturmethoden. (Bildquelle: Septentrio)
Abbildung 2: Stärken und Schwächen von drei gängigen GNSS-Korrekturmethoden. (Bildquelle: Septentrio)
Satellitengestützte Augmentierungssysteme (SBAS) werden allmählich auf regionaler Basis verfügbar und ersetzen die bodenstationsbasierten Korrekturmethoden RTK, PPP und RTK-PPP. SBAS verwendet immer noch Bodenstationen, um GNSS-Fehler zu messen, aber die Stationen sind über ganze Kontinente verteilt. Die gemessenen Fehler werden an einer zentralen Stelle verarbeitet, wo die Korrekturen berechnet und an geosynchrone Satelliten über dem abgedeckten Gebiet übertragen werden. Die Korrekturdaten werden von den Satelliten als Overlay oder Ergänzung zu den ursprünglichen GNSS-Daten gesendet.
Die GNSS-Genauigkeit hängt von der Verfügbarkeit und der Genauigkeit der Satellitenmessungen und der damit verbundenen Korrekturen ab. Leistungsstarke GNSS-Empfänger verfolgen GNSS-Signale auf mehreren Frequenzen und nutzen mehrere GNSS-Konstellationen und verschiedene Korrekturmethoden, um die erforderliche Genauigkeit und Ausfallsicherheit zu gewährleisten. Die daraus resultierende Redundanz ermöglicht eine stabile Leistung, selbst wenn einige der Satellitenmessungen und -daten gestört werden. Konstrukteure können aus einer Vielzahl von GNSS-Genauigkeits- und Redundanzfunktionen wählen (Abbildung 3).
 Abbildung 3: GNSS-Genauigkeitsstufen mit entsprechenden Korrekturmethoden und ausgewählten Anwendungen. (Bildquelle: Septentrio)
Abbildung 3: GNSS-Genauigkeitsstufen mit entsprechenden Korrekturmethoden und ausgewählten Anwendungen. (Bildquelle: Septentrio)
GNSS-Module: Integrierte und externe Antennen
Aufgrund der Komplexität der Multikonstellations-Positionsbestimmung sind Module von verschiedenen Anbietern erhältlich, die die Markteinführung beschleunigen, die Kosten senken und die Leistung sicherstellen. Allerdings müssen die Konstrukteure abwägen, ob sie eine interne Antenne verwenden oder sich stattdessen für eine externe Antenne für das GNSS-Modul entscheiden. Für Anwendungen, bei denen die Zeit bis zur Markteinführung und die Kosten im Vordergrund stehen, kann eine integrierte Antenne vorzuziehen sein, da sie einen wesentlich geringeren technischen Aufwand erfordert. Bei Anwendungen, die eine FCC- oder CE-Zertifizierung benötigen, kann die Verwendung eines Moduls mit integrierter Antenne den Zulassungsprozess ebenfalls beschleunigen. Allerdings kann die Größe der Lösung zunehmen, und die Flexibilität kann bei integrierten Antennenlösungen eingeschränkt sein.
Externe Antennen bieten Designern eine größere Bandbreite an Leistungs- und Layout-Optionen. Es kann eine große Hochleistungsantenne oder eine kleinere und leistungsschwächere Antenne gewählt werden. Außerdem ist die Platzierung der Antenne in Bezug auf die Position des GNSS-Moduls flexibler, was die Flexibilität des Designs weiter erhöht. Die Flexibilität bei der Platzierung ermöglicht es auch, dass externe Antennen für einen zuverlässigeren GNSS-Betrieb sorgen. Die Platzierung von Antennen und das Verlegen von Verbindungen kann jedoch ein komplexer und zeitaufwändiger Prozess sein, der spezielles Fachwissen erfordert, was die Kosten erhöhen und die Markteinführung verzögern kann.
Winziges GNSS-Modul für platzbeschränkte Designs
Entwicklungsteams, die über das erforderliche Know-how bei der Antennenplatzierung und -verlegung verfügen, können das Teseo-LIV3F von STMicroelectronics verwenden, ein GNSS-Modul mit mehreren Konstellationen (GPS/Galileo/GLONASS/BeiDou/QZSS), das eine externe Antenne verwendet (Abbildung 4). Das Modul ist in einem LCC-18-Gehäuse mit den Abmessungen 9,7 mm x 10,1 mm untergebracht und bietet eine Positionsgenauigkeit von 1,5 Metern (CEP) mit einer Zeit bis zum ersten Fix (TTFF) für Kalt- und Warmstart von unter 32 Sekunden (s) bzw. unter 1,5 s (GPS, GLONASS). Die Leistungsaufnahme im Standby-Modus beträgt 17 Mikrowatt (µW) und die Leistungsaufnahme bei der Nachführung 75 Milliwatt (mW).
 Abbildung 4: Das Tesco-LIV3F-GNSS-Modul umfasst den GNSS-Kern und die Subsysteme sowie alle erforderlichen Anschlussmöglichkeiten und die Energieverwaltung in einem Gehäuse von 9,7 x 10,1 mm. Es erfordert eine externe Antenne. (Bildquelle: STMicroelectronics)
Abbildung 4: Das Tesco-LIV3F-GNSS-Modul umfasst den GNSS-Kern und die Subsysteme sowie alle erforderlichen Anschlussmöglichkeiten und die Energieverwaltung in einem Gehäuse von 9,7 x 10,1 mm. Es erfordert eine externe Antenne. (Bildquelle: STMicroelectronics)
Der integrierte temperaturkompensierte Quarzoszillator (TCXO) mit 26 Megahertz (MHz) des Tesco-LIV3F gewährleistet eine hohe Genauigkeit, und der dedizierte Echtzeituhr-Oszillator (RTC) mit 32 Kilohertz (kHz) ermöglicht eine kürzere Zeit bis zur ersten Korrektur (TTFF). Funktionen wie Datenprotokollierung, autonomes unterstütztes GNSS für sieben Tage, Rekonfigurierbarkeit der Firmware (FW) sowie FW-Upgrades werden durch den integrierten 16-Megabit-Flash-Speicher ermöglicht.
Zu den Anwendungen, die sich für das Tesco-LIV3F eignen, gehören Versicherungen, Logistik, Drohnen, Mautsysteme, Diebstahlsicherung, Personen- und Tierortung, Fahrzeugverfolgung und Notrufe.
Als vorzertifizierte Lösung kann die Verwendung des Teseo-LIV3F-Moduls zu einer kürzeren Markteinführungszeit der endgültigen Anwendung führen. Es besitzt einen Betriebstemperaturbereich von -40 °C bis +85 °C.
Um mit dem Modul zu experimentieren und die Anwendungsentwicklung zu beschleunigen, können Entwickler das Evaluierungsboard AEK-COM-GNSST31 verwenden. In Verbindung mit der X-CUBE-GNSS1-Firmware kann das Evaluierungspaket die Funktionen Erfassung, Verfolgung, Navigation und Datenausgabe ohne externen Speicher unterstützen. Dieses EVB ist auch für die Verwendung mit einem SPC5-Mikrocontroller für die Entwicklung von Automobilanwendungen vorgesehen.
GNSS-Modul mit Interferenzminderung
Der Multikonstellations-GNSS-Empfänger 410322 mosaic-X5 von Septentrio ist ein 31 mm x 31 mm x 4 mm großes, oberflächenmontierbares Modul mit geringem Stromverbrauch, das Entwicklern eine Reihe von Schnittstellen bietet, darunter vier UARTs, Ethernet, USB, SDIO und zwei frei programmierbare GPIOs.
Das mosaic-X5 wurde für den Einsatz in der Robotik, in autonomen Systemen und anderen Massenmarktanwendungen entwickelt und zeichnet sich durch eine Aktualisierungsrate von 100 Hertz (Hz), eine Latenzzeit von unter 10 Millisekunden (ms) sowie eine vertikale und horizontale RTK-Positionierungsgenauigkeit von 0,6 cm bzw. 1 cm aus. Es kann alle GNSS-Konstellationen verfolgen, unterstützt aktuelle und zukünftige Signale und ist mit PPP-, SSR-, RTK- und SBAS-Korrekturen kompatibel. Die TTFF des Moduls liegt unter 45 s beim Kaltstart und unter 20 s beim Warmstart.
Das mosaic-X5 verfügt über mehrere von Septentrio patentierte Technologien, darunter AIM+, eine integrierte Technologie zur Unterdrückung von Interferenzen, die eine Vielzahl von Störern unterdrückt, von einfachen kontinuierlichen Schmalbandsignalen bis hin zu komplexen Breitband- und gepulsten Störsendern.
Die Schnittstellen, Befehle und Datenmeldungen der Module sind vollständig dokumentiert. Die enthaltene RxTools-Software ermöglicht die Empfängerkonfiguration und -überwachung sowie die Datenprotokollierung und -analyse.
Das mosaic-X5-Entwicklungskit 410331P3161 Septentrio von ermöglicht es Designern, Prototypen zu erforschen, zu bewerten und zu entwickeln, die die Möglichkeiten des mosaic-X5 voll ausschöpfen (Abbildung 5).
 Abbildung 5: Entwickler können mit dem mosaic-X5-Entwicklungskit 410331P3161 einen Prototyp erstellen, indem sie eine Vielzahl von Verbindungen nutzen, darunter Ethernet, COM-Ports oder USB 2.0, oder eine SD-Speicherkarte verwenden. (Bildquelle: Septentrio)
Abbildung 5: Entwickler können mit dem mosaic-X5-Entwicklungskit 410331P3161 einen Prototyp erstellen, indem sie eine Vielzahl von Verbindungen nutzen, darunter Ethernet, COM-Ports oder USB 2.0, oder eine SD-Speicherkarte verwenden. (Bildquelle: Septentrio)
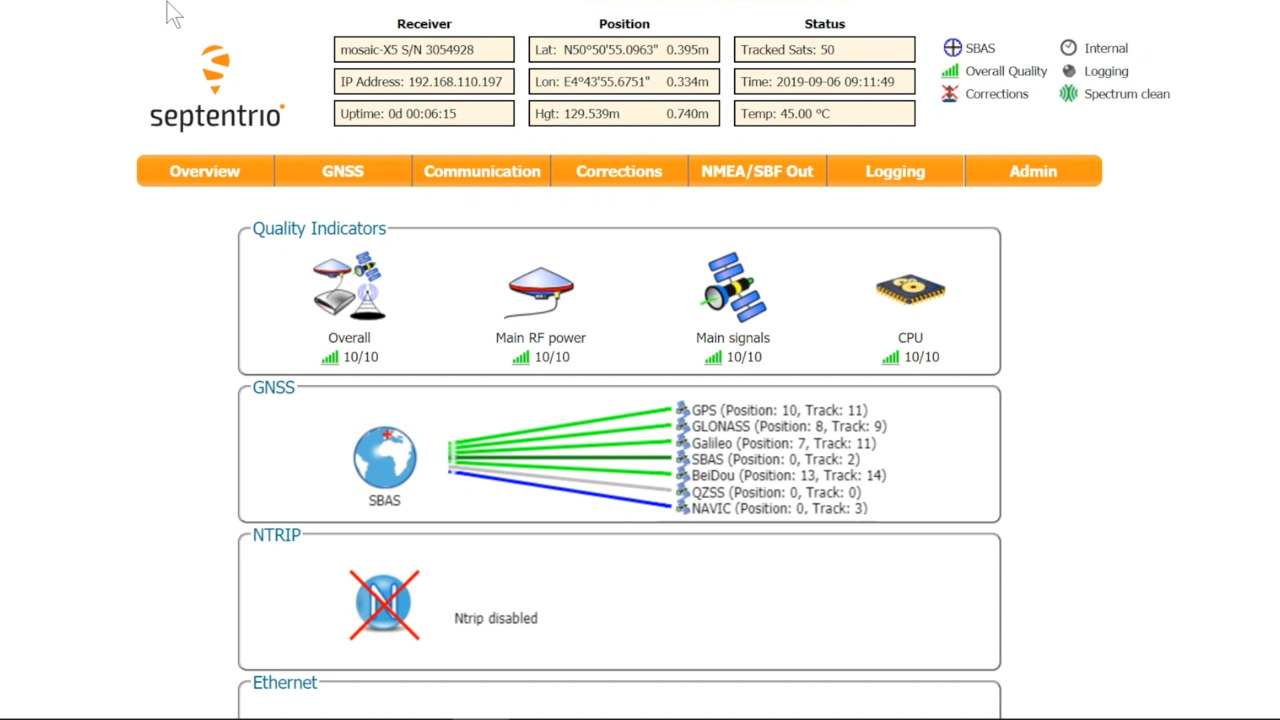
Das Kit nutzt die intuitive Web-Benutzeroberfläche des mosaic-X5 für eine einfache Bedienung und Überwachung, so dass Designer das Empfängermodul von jedem mobilen Gerät oder Computer aus steuern können. Die Webschnittstelle verwendet leicht ablesbare Qualitätsanzeigen zur Überwachung des Empfängerbetriebs.
Entwickler können einen Prototyp erstellen, indem sie das mosaic-Entwicklungskit über eine der folgenden Verbindungen integrieren: Ethernet, COM-Ports, USB 2.0, SD-Speicherkarte.
GNSS-Modul mit integrierter Antenne
Für Entwickler von Anwendungen, die vom Einsatz eines GNSS-Moduls mit integrierter Antenne profitieren können, bietet Würth Elektronik das Erinome-I-Modul 2614011037000 mit einem leistungsfähigen System-on-Chip (SoC) an (Abbildung 6). Das Modul unterstützt die GNSS-Konstellationen GPS, GLONASS, Galileo und BeiDou und verfügt über eine integrierte Antenne, die die Hardware-Integration vereinfacht und die Markteinführungszeit verkürzt. Das Modul, einschließlich der integrierten Antenne, misst 18 mm x 18 mm.
 Abbildung 6: Das Erinome-I 2614011037000 ist ein komplettes GNSS-Modul mit einem leistungsstarken GNSS-SoC und einer integrierten Antenne. (Bildquelle: Würth Elektronik)
Abbildung 6: Das Erinome-I 2614011037000 ist ein komplettes GNSS-Modul mit einem leistungsstarken GNSS-SoC und einer integrierten Antenne. (Bildquelle: Würth Elektronik)
Auf dem Modul befinden sich außerdem ein TCXO, ein HF-Filter, ein rauscharmer Verstärker (LNA) und ein serieller Flash-Speicher.
Würth bietet auch das Evaluierungsboard (EVB) 2614019037001 für das Erinome-I an (Abbildung 7). Das EVB kann auch als Referenzdesign für die Integration des GNSS-Moduls in eine Anwendung dienen. Über einen USB-Anschluss kann der EVB mit einem PC verbunden werden. Ein mehrpoliger Stecker ermöglicht den Entwicklern den Zugriff auf alle Pins des GNSS-Moduls.
 Abbildung 7: Das Evaluierungsboard 2614019037001 für das Erinome-I (nahe der Mitte der Platine, mit der integrierten Antenne in der Mitte des Moduls) dient auch als Referenzdesign. (Bildquelle: Würth Elektronik)
Abbildung 7: Das Evaluierungsboard 2614019037001 für das Erinome-I (nahe der Mitte der Platine, mit der integrierten Antenne in der Mitte des Moduls) dient auch als Referenzdesign. (Bildquelle: Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) ist ein einfaches PC-Tool zur Interaktion mit dem Erinome-I-GNSS-Modul über die UART-Schnittstelle. Es unterstützt:
- Steuerung des EVB-Betriebs
- Bidirektionale Kommunikation mit dem Erinome-I-Modul
- Evaluierung der Funktionen und Möglichkeiten des Erinome-I
- Vertrautheit mit Erinome-I-Protokollen, -Sätzen und -Befehlen
- Konfiguration des Erinome-I ohne Kenntnis der Protokolle
- Parsing von Sätzen und Befehlen, die vom Erinome-I verwendet werden
WENSS ermöglicht eine einfache Evaluierung von Positionsbestimmungsanwendungen ohne besondere Kenntnisse. Erfahrene Entwickler können WENSS auch für fortgeschrittenere Konfigurationen verwenden.
Fazit:
Eine genaue und zuverlässige Positionsbestimmung lässt sich am besten mit mehreren Konstellationen und der entsprechenden Korrekturtechnik erreichen. Es handelt sich dabei um komplexe Systeme, aber die Konstrukteure können auf vorgefertigte GNSS-Module, zugehörige Entwicklungskits und Umgebungen zurückgreifen, um schnell und effizient Optionen zu vergleichen und positionsbasierte Funktionen und Dienste zu implementieren.
Empfohlene Lektüre
Haftungsausschluss: Die Meinungen, Überzeugungen und Standpunkte der verschiedenen Autoren und/oder Forumsteilnehmer dieser Website spiegeln nicht notwendigerweise die Meinungen, Überzeugungen und Standpunkte der DigiKey oder offiziellen Politik der DigiKey wider.