Verwendung von Bluetooth-5.1-aktivierten Plattformen für präzise Bestandsverfolgung und die Positionsbestimmung in Innenräumen - Teil 1
Zur Verfügung gestellt von Nordamerikanische Fachredakteure von DigiKey
2019-07-25
Anmerkung des Herausgebers: Teil 1 dieser zweiteiligen Serie beschreibt die Fähigkeiten von Bluetooth 5.1 Direction Finding, einem Zusatz zur Niederenergie-Bluetooth-Firmware. Entwickler erhalten damit die Möglichkeit, Anwendungen für die Standortbestimmung auf Basis des Einfallswinkels (Angle of Arrival, AoA) und des Austrittswinkels (Angle of Departure, AoD) zu entwickeln, beispielsweise für Bestandsverfolgungssysteme und Systeme zur Standortbestimmung in Innenräumen (indoor positioning systems, IPS). Anschließend werden geeignete Plattformen besprochen, auf denen die neuen Funktionen laufen. In Teil 2 wird beschrieben, wie Anwendungen auf Basis von Bluetooth 5.1 Direction Finding entwickelt werden und wie mit dem Einsatz der neuen Plattformen begonnen werden kann.
Die Nachfrage nach Standortbestimmungsdiensten nimmt immer stärker zu, da Logistikunternehmen stets bestrebt sind, die Effizienz der Lieferkette durch das Tracking von Beständen in Echtzeit zu verbessern. Weiterhin soll eine Verbesserung der Produktivität in Bezug auf Geschäftsziele durch die Überwachung der Bewegungen von Mitarbeitern und Kunden erreicht werden. Mithilfe der Bluetooth-Empfangsfeldstärke (RSSI) kann die Entfernung von einem bekannten Festpunkt aus eingeschätzt werden, allerdings ist diese Methode für Anwendungen wie dem Positionsbestimmungssystem für Innenräume (IPS) und der Bestandsverfolgung häufig nicht präzise genug. Dank eines Updates der Bluetooth-Spezifikation ist jetzt eine genauere Vorgehensweise möglich.
Die neue Version der Bluetooth Core Specification (Version 5.1) (die als „Bluetooth 5.1 Direction Finding“ vermarktet wird) verfügt über die Peilungsfunktionen „Angle of Arrival“ (AoA) und „Angle of Departure“ (AoD), mit denen Entwickler die Position eines Bluetooth-Senders viel einfacher und präzise in zwei oder drei Dimensionen bestimmen können.
Dieser Artikel – der erste von zwei Teilen – beschreibt AoA und AoD und erklärt, wie die Implementierung von Methoden leichter dank Erweiterungen der Bluetooth Core Specification umgesetzt werden kann. Anschließend werden realisierbare Plattformen vorgestellt, auf denen Funkpeilungsanwendungen implementiert werden können.
HF-Funkpeilungsmethoden
Die auf RSSI basierende HF-Funkpeilung bietet eine Entfernungsberechnung auf Grundlage der Signalstärke. Wenn mehrere Entfernungsmessungen von verschiedenen Punkten aus durchgeführt werden, kann eine bessere Genauigkeit erreicht werden. Ein wichtiger Vorteil von RSSI besteht darin, dass nur eine Antenne pro Gerät erforderlich ist und die Komplexität, Kosten und Größe von Antennenarrays vermieden werden können. Der Nachteil ist die geringe Präzision, da mit dieser Methode lediglich eine Genauigkeit auf 3 bis 5 Meter (m) erreicht werden kann.
Eine zweite, häufig eingesetzte Funkpeilungsmethode wird als „Time of Arrival“ (ToA, Eingangszeit) bezeichnet, die die Laufzeit eines Funksignals von einem Sender zu einem abgelegenen Empfänger misst. Auch diese Methode erfordert nur eine Antenne pro Gerät. Der Nachteil ist jedoch, dass jedes Gerät über einen überaus akkuraten, synchronisierten Taktgeber verfügen muss. Die Positionsgenauigkeit beläuft sich bei ToA-Systemen auf ungefähr 1 m.
Mit Herausgabe der Spezifikation Bluetooth 5.1 brachte die Bluetooth Special Interest Group (SIG) eine dritte Funkpeilungsmethode auf Grundlage von AoA und AoD heraus.
Beim AoA misst ein Empfänger die Einfallswinkel einzelner Objekte, wohingegen beim AoD das Empfängergerät seine eigene Position im Raum berechnet und dafür Winkel verschiedener Beacons und deren Positionen (Abb. 1) verwendet.
 and AoD method (right)") Abbildung 1: Bei der Funkpeilungsmethode mit AoA (links) senden Assets (TX) ihre Position an einen AoA-Positionierer, der den Einfallswinkel des Signals misst. Bei der AoD-Methode (rechts) senden Beacons AoD-Daten, die von einem mobilen Gerät (RX) empfangen und für die Berechnung der Position verwendet werden. In jedem Fall erfordert das empfangene Gerät genug Rechenleistung, um die Richtung des Senders zu bestimmen. (Bildquelle: Silicon Labs)
Abbildung 1: Bei der Funkpeilungsmethode mit AoA (links) senden Assets (TX) ihre Position an einen AoA-Positionierer, der den Einfallswinkel des Signals misst. Bei der AoD-Methode (rechts) senden Beacons AoD-Daten, die von einem mobilen Gerät (RX) empfangen und für die Berechnung der Position verwendet werden. In jedem Fall erfordert das empfangene Gerät genug Rechenleistung, um die Richtung des Senders zu bestimmen. (Bildquelle: Silicon Labs)
Die Entscheidung für die Berücksichtigung einer Funkpeilungsfunktion in Bluetooth 5.1 wurde teilweise aus dem Grund getroffen, dass einige Unternehmen bereits selbst entwickelte AoA- und AoD-Lösungen für Niederenergie-Bluetooth-Produkte (BLE) anbieten. Dank Bluetooth 5.1 können Entwickler die HF-Funkpeilung durch Integration eines Updates der Core Specification leichter nutzen, was die Extraktion von „IQ“-Signaldaten (gleichphasige und quadraturphasige Daten) aus BLE-Paketen erleichtert. Damit können Entwickler wiederum leichter Anwendungen zur Standortbestimmung umsetzen.
Die AoA-Methode eignet sich beispielsweise zum Tracken eines sendenden BLE-Transceivers. Mithilfe einer Einzelantenne sendet der Transceiver für die Funkpeilung aktivierte Pakete, die von einem Mehrfachantennen-Positionierer empfangen werden. Der Positionierer entnimmt IQ-Daten aus den Signalpaketen und wechselt zwischen den einzelnen aktiven Antennen im Array. Dabei wird der Phasenunterschied erkannt, der auf den unterschiedlichen Abstand zwischen der sendenden Einzelantenne und jeder Antenne im Array zurückzuführen ist. Diese Phasendifferenz wird anschließend von der Positionierungs-Engine verwendet, um den Winkel zu bestimmen, aus dem die Signale empfangen wurden, was gleichzeitig der Richtung des Senders entspricht (Abb. 2).
 Abbildung 2: Der Einfallswinkel eines Funksignals kann berechnet werden, wenn die Signalphase (θ) an jeder Antenne, die Wellenlänge (λ) und die Entfernung (d) zwischen nebeneinanderliegenden Antennen bekannt sind. (Bildquelle: Bluetooth SIG)
Abbildung 2: Der Einfallswinkel eines Funksignals kann berechnet werden, wenn die Signalphase (θ) an jeder Antenne, die Wellenlänge (λ) und die Entfernung (d) zwischen nebeneinanderliegenden Antennen bekannt sind. (Bildquelle: Bluetooth SIG)
Durch Kombination der berechneten Signalrichtung von zwei oder mehreren Positionierern kann ein Sender lokalisiert werden (Abb. 3).
 Abbildung 3: Durch Berechnung des AoA der Signale an zwei festen Positionierern kann die Position eines sendenden Assets in drei Dimensionen berechnet werden. Wenn die absoluten Koordinaten des Positionierers bekannt sind, können auch die absoluten Koordinaten des sendenden Assets bestimmt werden. (Bildquelle: Silicon Labs)
Abbildung 3: Durch Berechnung des AoA der Signale an zwei festen Positionierern kann die Position eines sendenden Assets in drei Dimensionen berechnet werden. Wenn die absoluten Koordinaten des Positionierers bekannt sind, können auch die absoluten Koordinaten des sendenden Assets bestimmt werden. (Bildquelle: Silicon Labs)
Bei der AoD-Methode geschieht dies umgekehrt. In diesem Szenario sendet das Gerät mit Antennenarray ein Signal über jede seiner Antennen. Beim Eingang jedes Signalpakets der Antennen im Array an der Einzelantenne des Empfängers wird es aufgrund der unterschiedlichen Entfernung vom Sender vom vorherigen Signal phasenverschoben (Abb. 4).
 Abbildung 4: Bei der AoD-Methode wird jedes Signalpaket der Antennen im Array beim Eingang an der Einzelantenne des Empfängers aufgrund der unterschiedlichen Entfernung vom Sender vom vorherigen Signal phasenverschoben. (Bildquelle: Bluetooth SIG)
Abbildung 4: Bei der AoD-Methode wird jedes Signalpaket der Antennen im Array beim Eingang an der Einzelantenne des Empfängers aufgrund der unterschiedlichen Entfernung vom Sender vom vorherigen Signal phasenverschoben. (Bildquelle: Bluetooth SIG)
Die Antenne des empfangenden Geräts nutzt die IQ-Informationen der Datenpakete und leitet sie an die Positionierungs-Engine weiter. Diese nutzt die Daten daraufhin zur Bestimmung des Winkels, aus dem die Signale eingefallen sind, was gleichzeitig der Richtung des Senders entspricht. Dieses System eignet sich u. a. für Anwendungen zur Navigation in Innenräumen, bei denen der Sender ein fester Referenzpunkt und der Empfänger beispielsweise das Smartphone eines Kunden ist.
Updates an Bluetooth 5.1
Bluetooth 5.1 erfordert Änderungen am HF-Softwareprotokoll (oder „Stack“) und – je nach Chiphersteller – einige Hardware-Erweiterungen (Funk). Zuerst fügt das überarbeitete Protokoll eine Dauertonerweiterung (CTE) zu jedem Bluetooth-Paket hinzu, das in der Funkpeilung verwendet wird. (Die Pakete werden ansonsten nicht geändert und können daher für die standardmäßige BLE-Kommunikation eingesetzt werden.)
CTE ist ein reiner (d. h. unmodulierter) Ton, der zwischen 16 und 160 Mikrosekunden (µs) auf der Bluetooth-Trägerfrequenz plus 250 Kilohertz (kHz) (oder gelegentlich plus 500 kHz, wenn der höhere Durchsatzmodus von BLE verwendet wird) gesendet wird. Dieser Ton umfasst eine 1 s lange rauschfreie Sequenz, die lang genug gesendet wird, sodass der Empfänger die IQ-Daten ohne Modulationsstörungen extrahieren kann. Da das CTE-Signal zuletzt übertragen wird, wird die zyklische Redundanzprüfung (CRC) des Pakets nicht beeinflusst.
Die zweite wichtige Ergänzung der Spezifikation erleichtert Entwicklern die Konfiguration des Protokolls für die Durchführung der IQ-Tastung erheblich. Diese Konfiguration beinhaltet die Erfassung der Zeiten und der Antennenumschaltung, was für die Präzision der Positionsbestimmung kritisch ist.
Es können zwar mehrere Zeitkonfigurationen für die IQ-Abtastung zur Anwendung kommen, normalerweise wird jedoch alle 1 oder 2 µs im Referenzzeitraum jeder Antenne ein IQ-Abtastwert genommen. Die Ergebnisse werden im RAM des BLE-SoC gespeichert. Die Variationen in der Phase des empfangenen Signals bei der Abtastung der verschiedenen Antennen im Array werden in Abbildung 5 dargestellt.[1]
 Abbildung 5: Ein Signal eines Einzelsenders weist beim Einfall an den Antennen, die unterschiedliche Entfernungen von der Quelle haben, eine verschiedene Phase auf. (Bildquelle: Bluetooth SIG)
Abbildung 5: Ein Signal eines Einzelsenders weist beim Einfall an den Antennen, die unterschiedliche Entfernungen von der Quelle haben, eine verschiedene Phase auf. (Bildquelle: Bluetooth SIG)
Die Speicherung der IQ-Abtastwerte ist nur der erste Schritt bei der Entwicklung einer Anwendung zur Standortbestimmung. Zum Abschluss der Aufgabe müssen Entwickler die optimalen Antennenarrays für die Positionierer und Beacons entwickeln oder auswählen, die in der Anwendung zum Einsatz kommen. Anschließend müssen die komplexen Algorithmen bewältigt werden, die für die Ausführung der Berechnungen zur Funkpeilung genutzt werden.
Berechnung der Signalrichtung
Die für die Funkpeilung eingesetzten Antennenarrays werden normalerweise in drei Arrayarten unterteilt: einheitlich lineares Array (ULA), einheitlich rechteckiges Array (URA) und einheitlich rundes Array (UCA). Die Namen weisen bereits darauf hin, dass das lineare Array eindimensional ist und die rechteckigen und runden Arrays zweidimensional sind. Das ULA kann am einfachsten entworfen und implementiert werden. Sein Nachteil besteht jedoch darin, dass es den Seitenwinkel nur unter der Annahme berechnen kann, dass das kontrollierte Gerät sich konstant auf derselben Ebene bewegt. Wenn dies nicht der Fall ist, wird die Präzision beeinträchtigt. URAs und UCAs können Seiten- und Höhenwinkel zuverlässig messen (Abb. 6).
 Abbildung 6: AoA- und AoD-Methoden für die Funkpeilung erfordern Antennenarrays, die typischerweise eine lineare, rechteckige und runde Form haben. Jede Art von Array kann zwar Angaben zu Höhe und Seitenwinkel abrufen, allerdings bieten die rechteckigen und runden Arten zuverlässigere Angaben zum Seitenwinkel. (Bildquelle: Silicon Labs)
Abbildung 6: AoA- und AoD-Methoden für die Funkpeilung erfordern Antennenarrays, die typischerweise eine lineare, rechteckige und runde Form haben. Jede Art von Array kann zwar Angaben zu Höhe und Seitenwinkel abrufen, allerdings bieten die rechteckigen und runden Arten zuverlässigere Angaben zum Seitenwinkel. (Bildquelle: Silicon Labs)
Die Gestaltung eines Antennenarrays für die Funkpeilung darf nicht unterschätzt werden. Wenn Antennen in einem Array angeordnet werden, stören sie aufgrund der gegenseitigen Kopplung beispielsweise ihre Reaktionen. Um diese Wirkungen zu berücksichtigen, erfordern Schätzungsalgorithmen häufig vordefinierte Arrayreaktionen. Ein häufig gewerblich genutzter Algorithmus geht aus mathematischer Sicht beispielsweise davon aus, dass das Array aus zwei identischen Subarrays gebildet wird. Fehlende Kenntnisse im Bereich Antennen können durch kommerzielle Antennenarrays ausgeglichen werden, die mit definierten Merkmalen verfügbar sind.
Mit einem effektiven Antennenarray kann sichergestellt werden, dass genaue IQ-Tastwerte erfasst werden. Die Rohdaten sind jedoch nicht ausreichend, um die Signalrichtung zu bestimmen. Die Daten müssen verarbeitet werden, um den Einfall über mehrere Wege, die Signalpolarisierung und Laufstreckenverzögerungen, Rauschen und Jitter zu berücksichtigen.
Da die Bestimmung der HF-Richtung kein neues Fachgebiet ist, gibt es mehrere etablierte Methoden für die Abschätzung des Einfallswinkels auf Grundlage der IQ-Tastwerte, die aus realen Anwendungen gewonnen wurden. Die Definition des Problems, d. h. die Schätzung des Einfallswinkels (die Berechnung des Austrittswinkels ist ähnlich) eines gesendeten (Schmalband-)Signals, das am Eintrittsarray ankommt, ist einfach. Die für die Lösung erforderliche Mathematik allerdings nicht.
Einfach erklärt, berechnen kommerzielle Algorithmen aus den Daten der IQ-Testwerte jeder Antenne im Array zunächst den Datenvektor „x“ auf Grundlage der folgenden Formel (gleichzeitig ausgehend davon, dass es zu einer Phasenverschiebung der Signale und zu skalierten sinusförmigen (Schmalband-)Signalen kommt):
![]() Gleichung 1
Gleichung 1
Hierbei gilt: „a“ ist das mathematische Modell des Antennenarrays (der „Lenkvektor“),
„s“ das eingehende Signal und „n“ ein Term für das Rauschen.
X wird dann verwendet, um die Kovarianz-Matrix „Rxx“ des IQ-Testwerts mit folgender Formel zu berechnen:
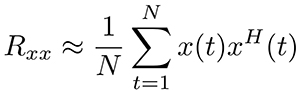 Gleichung 2
Gleichung 2
Diese Kovarianz-Matrix wird anschließend als Eingabe für den Hauptkalkulatoralgorithmus verwendet. Einer der beliebtesten und am besten bewährten Algorithmen für die Frequenzschätzung und Funkpeilung ist die Mehrfachsignal-Klassifizierung („MUltiple SIgnal Classification“, MUSIC). Aus technischer Perspektive nutzt MUSIC die Eigenvektor-Zerlegung und Eigenwerte der Kovarianzmatrix für die Schätzung des AoA auf Grundlage der Eigenschaften der Unterräume von Signal und Rauschen.
Folgende Formel wird verwendet:
![]() Gleichung 3
Gleichung 3
Hierbei gilt: „A“ ist eine diagonale Matrix, die die Eigenwerte enthält, und „V eine Matrix, die die entsprechenden Eigenvektoren beinhaltet.
Sobald V isoliert wurde, kann dieser Wert in einer Formel genutzt werden, die ein Pseudospektrum mit einer Spitze generiert, die beim Einfallswinkel des eingehenden Signals auftritt (Gleichung 4):
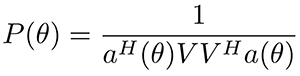 Gleichung 4
Gleichung 4
Das resultierende Spektrum ergibt die angezeigte Form, wobei die Spitze in der Richtung auftritt, aus der das gesendete Signal ankommt (Abb. 7).[2]
 Abbildung 7: Der MUSIC-Algorithmus nutzt IQ-Tastwerte, um ein Pseudospektrum der Leistung zu generieren, dessen Spitze die Position des sendenden Gerätes darstellt. Im Beispiel wird ein 2D-Pseudospektrum dargestellt, in dem sich das sendende Gerät in einem Seitenwinkel von 50 Grad und einem Höhenwinkel von 45 Grad befindet. (Bildquelle: Silicon Labs)
Abbildung 7: Der MUSIC-Algorithmus nutzt IQ-Tastwerte, um ein Pseudospektrum der Leistung zu generieren, dessen Spitze die Position des sendenden Gerätes darstellt. Im Beispiel wird ein 2D-Pseudospektrum dargestellt, in dem sich das sendende Gerät in einem Seitenwinkel von 50 Grad und einem Höhenwinkel von 45 Grad befindet. (Bildquelle: Silicon Labs)
Die Ausführung von Funkpeilungsalgorithmen erfordert eine enorme Rechenleistung und eine hohe RAM- und Flash-Speicherkapazität.
Kommerzielle Bluetooth-5.1-Produkte mit den entsprechenden Ressourcen sind bereits verfügbar. Beispielsweise bietet Dialog Semiconductor den Bluetooth-5-LE-SoC DA14691 für Anwendungen zur Standortbestimmung an. Der Chip wird von einem Arm®-Cortex®-M33-Mikroprozessor angetrieben und beinhaltet ein 512 KB starkes RAM. Silicon Labs hat ein Bluetooth-5.1-Stack für seinen BLE-SoC EFR32BG13 herausgegeben. Der Chip nutzt einen Arm-Cortex-M4-Mikroprozessor mit 64 KB RAM und 512 KB Flash.
Nordic Semiconductor ist einen Schritt weiter gegangen und hat mit dem nRF52811 eine neue Hardware für die Funkpeilung herausgegeben. Dieser BLE-SoC ist kompatibel mit Bluetooth 5.1 und kombiniert einen Arm-Cortex-M4-Mikroprozessor mit dem Multiprotokoll-Funkgerät des hochentwickelten Funk-SoC nRF52840 von Nordic. Der Chip beinhaltet 192 KB Flash und 24 KB RAM.
In Teil 2 dieses Artikels wird erklärt, wie die Entwicklungsplattformen auf Grundlage dieser SoCs und Stacks (mit weiteren Komponenten, u. a. Antennenarrays, zusätzliche Mikroprozessoren und verbundene Speicher sowie die Firmware der „Standort-Engine“) genutzt werden können, um praktische Standortdienstanwendungen wie Bestandsverfolgung und IPS zu implementieren.
Fazit
Die letzten Erweiterungen der Core Specification, die in Bluetooth 5.1 übernommenen wurden, erleichtern den Zugriff auf IQ-Daten. Die Daten können verwendet werden, um HF-Peilungsalgorithmen zu nutzen, die den AoA oder AoD einer Bluetooth-Funkübertragung berechnen und diese Informationen dann verwenden, um die Position eines Senders in zwei oder drei Dimensionen zu schätzen.
Die Algorithmen können zwar als Grundlage praktischer Standortserviceanwendungen verwendet werden, z. B. in der Bestandsverfolgung und IPS, ihre Präzision ist jedoch von der optimalen Ausführung des Antennenarrays, einem bewährten HF-Peilungsalgorithmus und ausreichend großen Prozessor- und Speicherressourcen abhängig, um die komplexen Berechnungen auszuführen.
Teil 2 dieser Serie wird zeigen, dass die Entwicklung zwar alles andere als einfach ist, es für Entwickler dank der Verfügbarkeit kommerzieller Plattformen für Bluetooth 5.1 Direction Finding, Antennenarrays und der Firmware für die Standort-Engine jedoch immer einfacher ist, mit der Entwicklung von Standortserviceanwendungen mit Zentimeterpräzision zu beginnen.
Referenzen
- Bluetooth Direction Finding: A Technical Overview, Martin Wooley, Bluetooth SIG, March 2019.
- Understanding Advanced Bluetooth Angle Estimation Techniques for Real-Time Locationing, Sauli Lehtimaki, Silicon Labs, 2018
Haftungsausschluss: Die Meinungen, Überzeugungen und Standpunkte der verschiedenen Autoren und/oder Forumsteilnehmer dieser Website spiegeln nicht notwendigerweise die Meinungen, Überzeugungen und Standpunkte der DigiKey oder offiziellen Politik der DigiKey wider.