





Motoren für Maker - Teil 1: Adafruit-Kit löst das Problem des beweglichen Kopfes
Ich muss zugeben, dass ich derzeit ein wenig in der Klemme stecke. Ich habe nämlich beschlossen, ein paar meiner Hobbyprojekte mit Bewegung auszustatten, aber ich bin ein ziemlicher Neuling, wenn es um die Auswahl und den Einsatz der verschiedenen Arten von verfügbarer Motoren und Linearantrieb geht. Außerdem kenne ich mich mit der Bestimmung von Dingen wie Drehmoment, Übersetzungsverhältnis und anderen Dingen dieser Art nicht aus.
Ich erinnere mich, dass ich im Rahmen meines Universitätsstudiums Vorlesungen zu diesem Thema besucht habe, aber das war in den dunklen Zeiten, die wir Ende der 1970er Jahre nannten und die nun schon mehr als 40 Jahre in meinem Leben zurückliegen. Ich bin mir ziemlich sicher, dass meine Professoren mir viele nützliche Dinge beigebracht haben, aber ich fürchte, dass meine kleinen grauen Zellen bei dieser Arbeit versagen.
Wie ich immer sage: „Zeig mir eine blinkende LED, und ich zeige dir einen sabbernden Mann.“ (Nennen Sie mich ruhig altmodisch.) Das erste meiner Hobby-Projekte ist also ein Roboterkopf mit dreifarbigen LEDs als Augen. Als ich anfing, wollte ich eine billige und lustige (manche würden vielleicht sagen: schnelle und schmutzige) Plattform zum Herumspielen bauen. Also habe ich einfach etwas aus Holz und Pappe gebastelt, das mit Heißkleber zusammengehalten wurde.
Eine Zeit lang war alles gut und richtig in der Welt von Max (wo die Schmetterlinge größer sind, die Blumen farbenfroher leuchten und die Vögel süßer singen). Aber dann sagte einer meiner Freunde, dass es noch toller wäre, wenn ich Bewegung in die Sache bringen würde. Er schlug insbesondere vor, dass die Augen von einer Seite zur anderen schwenken und nach vorn und hinten kippen können. Außerdem muss sich der gesamte Kopf schwenken, neigen und von einer Seite zur anderen neigen lassen.
Damit sind wir wieder bei der Tatsache, dass ich ein Bär mit wenig Hirn bin, wenn es darum geht, zwischen den verschiedenen Arten von verfügbaren Motoren und Stellgliedern zu wählen. Ich gebe zu, dass ich die grundlegenden Unterschiede zwischen Bürsten-Gleichstrommotoren, bürstenlosen Drehstrommotoren, Schrittmotoren, Servomotoren und Linearantrieben verstehe, aber ich weiß nicht so recht, welche Motoren für die verschiedenen Anwendungen, z. B. für einen Roboterkopf, zu verwenden sind.
Erste Schritte mit Servomotoren
All dies wird einige Nachforschungen erfordern, die zweifellos in einem zukünftigen Blog resultieren werden. In der Zwischenzeit habe ich zwei Mini-Schwenk-/Neige-Robotik-Bausätze 1967 von Adafruit bestellt (Abbildung 1), damit ich etwas zum Spielen habe.
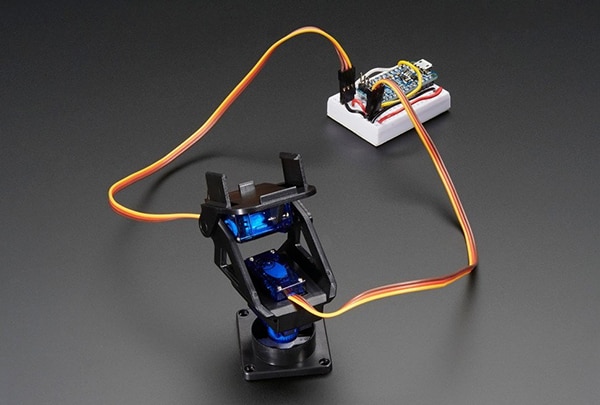 Abbildung 1: Der vollständig montierte Schwenk-Neige-Bausatz 1967 ist mit zwei Mikroservomotoren (Typ SG-90 oder SG-92) ausgestattet, die ein Schwenken um 180° von einer Seite zur anderen und ein Neigen um 150° nach oben und unten ermöglichen. (Bildquelle: Adafruit)
Abbildung 1: Der vollständig montierte Schwenk-Neige-Bausatz 1967 ist mit zwei Mikroservomotoren (Typ SG-90 oder SG-92) ausgestattet, die ein Schwenken um 180° von einer Seite zur anderen und ein Neigen um 150° nach oben und unten ermöglichen. (Bildquelle: Adafruit)
Ich weiß zwar, dass ich diese Servomotoren mit Pulsweitenmodulation (PWM) direkt über die digitalen Ausgangspins eines Mikrocontrollers steuern kann, habe aber es immer vorgezogen, eine Form der Trennung zwischen meinem Mikrocontroller und der Außenwelt aufrechtzuerhalten, selbst wenn diese nur aus einem Feldeffekttransistor (FET) besteht.
Angenommen, ich entscheide mich, in meiner endgültigen Implementierung Servomotoren zu verwenden, dann werde ich zum Schluss mindestens zwei Servomotoren für jedes Auge und mindestens drei oder vier für den Hauptkopf steuern müssen. Daher beschloss ich, in eine der 16-kanaligen 12-Bit-PWM-Treiberplatinen 815 von Adafruit zu investieren (Abbildung 2).
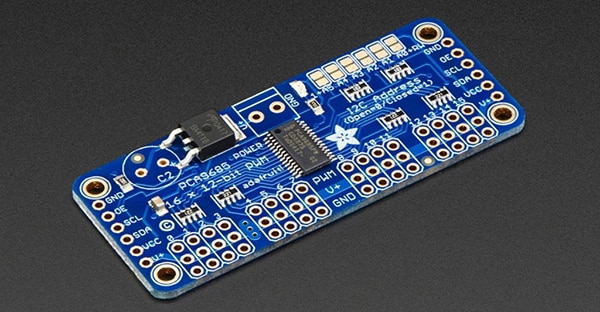 Abbildung 2: Mit Hilfe der I2C-Schnittstelle und über nur zwei Mikrocontroller-Pins kann dieses 16-Kanal-PWM-Board sowohl LEDs als auch Servomotoren steuern. (Bildquelle: Adafruit)
Abbildung 2: Mit Hilfe der I2C-Schnittstelle und über nur zwei Mikrocontroller-Pins kann dieses 16-Kanal-PWM-Board sowohl LEDs als auch Servomotoren steuern. (Bildquelle: Adafruit)
Das Tolle an diesem Board ist, dass es über eine I2C-Schnittstelle gesteuert wird und daher nur zwei der digitalen Ausgangspins des Mikrocontrollers benötigt. Jeder der 16 PWM-Ausgänge kann entweder zur Ansteuerung einer LED oder eines Servomotors verwendet werden.
Bürstenlose DC-Motoren
Durch eine seltsame Fügung des Schicksals habe ich vor kurzem begonnen, über ein anderes Projekt nachzudenken, das Know-how zu Motoren erfordert. Das Ganze begann vor drei oder vier Jahren, als mir ein Freund einen fantastischen Drehkondensator von yesteryear schenkte (Abbildung 3).
 Abbildung 3: Dieser Drehkondensator nutzt Metallplatten als festen Stator und einen zweiten Satz von Platten als beweglichen Rotor mit Luft als Dielektrikum. (Bildquelle: Max Maxfield)
Abbildung 3: Dieser Drehkondensator nutzt Metallplatten als festen Stator und einen zweiten Satz von Platten als beweglichen Rotor mit Luft als Dielektrikum. (Bildquelle: Max Maxfield)
Als gerade niemand hinsah, habe ich kurz gegoogelt und entdeckt, dass der Drehkondensator mit Luftdielektrikum von dem ungarischen Ingenieur Dezső Korda erfunden wurde, der 1893 ein deutsches Patent für seine Erfindung erhielt.
Mit einer Volumen von etwa 30 x 30 x 30 Zentimetern (cm) ist dieses Gerät wunderschön anzuschauen. Die Hauptstruktur besteht aus verschiedenen Metallen, und die Strukturen, die den Kondensator bilden, sind durch isolierende Glastrennwände elektrisch vom Rahmen getrennt. Ich weiß nicht, ob diese Teile noch hergestellt werden (ich bezweifle es irgendwie), aber wenn ja, dann zittere ich bei dem Gedanken, wie viel ein neues Exemplar kosten würde.
Bevor er ihn mir schenkte, hatte mein Freund den Kondensator auf einen Holzsockel montiert (den ich durch etwas Spektakuläreres ersetzen werde), seine Endanschläge entfernt, damit er sich stufenlos um 360° drehen kann, und einen Motor und einen Antriebsriemen hinzugefügt (auf dem Foto unten rechts zu sehen).
Es ist mir peinlich, zu sagen, dass dieses prächtige Exemplar die letzten Jahre auf einem der Bücherregale in meinem Büro verbracht und dort Staub angesammelt hat. Ich habe es vor ein paar Wochen zufällig gesehen und dachte: „Ich sollte wirklich etwas damit machen.“
Um ehrlich zu sein, dachte ich nicht, dass dies ein großes Problem sein würde, bis ich mir den Motor von innen ansah und feststellte, dass er drei Drähte hat. „Oh je“, dachte ich. Ich rief meinen Freund an, der mir bestätigte, dass es sich um einen bürstenlosen 12-Volt-Drehstrommotor handelt. Er sagt, er habe diesen Motortyp verwendet, weil er extrem leise ist, sowohl akustisch als auch elektrisch. Jetzt muss ich also eine Möglichkeit finden, die Drehzahl und Drehrichtung dieses kleinen Schurken zu steuern.
Fazit
Da ich dazu neige, mich in Dinge zu stürzen, und ich davon ausgehe, dass Bewegung eine Rolle in meinen zukünftigen Hobbyprojekten spielen wird, werde ich anfangen, mehr über Motoren und Stellglieder zu lernen. Der Schwenk-Neige-Bausatz 1967 und das PWM-Board 817 von Adafruit erwiesen sich als sehr nützlich für den Anfang und werden es wahrscheinlich auch für zukünftige Projekte sein.
Ich habe auch gerade ein Exemplar des Buches „Motors for Makers: A Guide to Steppers, Servos, and Other Electrical Machines“ von Matthew Scarpino bestellt.
Ich werde in einem zukünftigen Blog weiter berichten. Haben Sie in der Zwischenzeit irgendwelche Gedanken, die Sie uns mitteilen möchten? Wie immer freue ich mich über Ihre Kommentare, Fragen und Vorschläge.
Über den Autor

Clive „Max“ Maxfield erhielt 1980 seinen BSc in Regelungstechnik von der Sheffield Hallam University, England, und begann seine Karriere als Entwickler von Zentraleinheiten (CPUs) für Großrechner. Im Laufe der Jahre hat Max alles von Siliziumchips bis hin zu Leiterplatten und von Gehirnwellenverstärkern bis hin zu Steampunk-Prognosemaschinen (bitte nicht fragen) entwickelt. Darüber hinaus ist er seit mehr als 30 Jahren an der Spitze der Electronic Design Automation (EDA) tätig.
Max ist Autor und/oder Co-Autor einer Reihe von Büchern, darunter „Designus Maximus Unleashed“ (in Alabama verboten), „Bebop to the Boolean Boogie“ (Ein unkonventioneller Leitfaden zur Elektronik), „EDA: Where Electronics Begins“, „FPGAs: Instant Access“ und „How Computers Do Math“. Werfen Sie auch einen Blick auf seinen Blog „Max's Cool Beans“.

Have questions or comments? Continue the conversation on TechForum, Digi-Key's online community and technical resource.
Visit TechForum




