

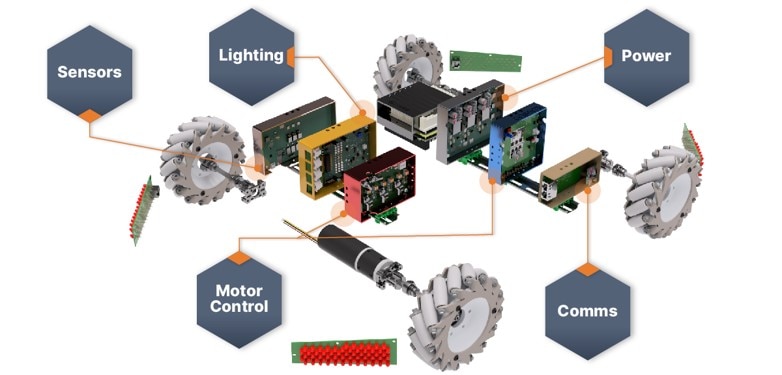
Autonomer mobiler Roboter
Das Konzept des autonomen mobilen Roboters von onsemi ist eine umfassende Robotiklösung, die mit hocheffizienten und innovativen Lösungen von onsemi entwickelt wurde. Es lässt sich als Grundlage für die Entwicklung verschiedener Arten von Robotern, Cobots, Elektrowerkzeugen und autonomen Fahrzeugen durch die Kombination verschiedener intelligenter und leistungsfähiger Lösungen von onsemi verwenden.
- Steuerungskits für BLDC-Motoren
- Batterieladung und Energiewandlung
- Bildsensoren und Lidar-Lösungen
- Konnektivitätslösungen
- LED-Beleuchtung
- Industrielle Cobots und Roboter
- Lagerroboter
- Lieferroboter
- Elektrowerkzeuge
- Roboter in der Landwirtschaft
- Rasenmäher
- Autonome Fahrzeuge

Video zu autonomen mobilen Robotern –

Interview auf der Embedded World 2024 –

Technisches Fachgespräch: Robotik und physische KI -
- BLDC-Motorsteuerungslösungen
- Sensorlösungen
- Stromversorgungslösungen
- Beleuchtungslösungen
- Kommunikationslösungen
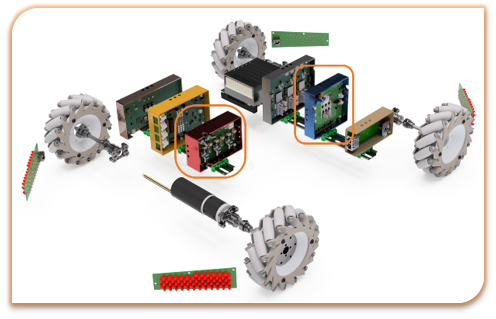
BLDC-Motorsteuerungslösungen
Den Anfang macht die BLDC-Motorsteuerungslösung, wo eigentlich die Auswahl zwischen drei verschiedenen Plattformen besteht. Die erste ist unser Ecospin-basiertes integriertes Motorentwicklungssystem. Dabei handelt es sich um eine vollständig integrierte Lösung für die Steuerung von BLDC-Motoren. Sie verfügt über integrierte Bootstrap-Dioden. Dazu kommen ein Messverstärker, ein Gate-Treiber und ein Mikrocontroller. Die Firmware ist ebenfalls verfügbar.
Die zweite Lösung ist ein auf Xilinx basierendes System, das diskrete Gate-Treiber und MOSFETS kombiniert. Es kann für Plattformen verwendet werden, bei denen mehr Rechenleistung auf der Motorsteuerungsebene erforderlich ist.
Den Abschluss bildet eine Lösung, die auf Elektrowerkzeuge ausgelegt ist.
Weitere empfohlene Produkte

NCD83591MNTXG
Details anzeigen, 5-POLIGES DFN-GEHÄUSE")
NVMFS5C410NWFAFT1G
Details anzeigen
NCP730BMT250TBG
Details anzeigen
NCH-RSL15-512-101Q40-ACG
Details anzeigen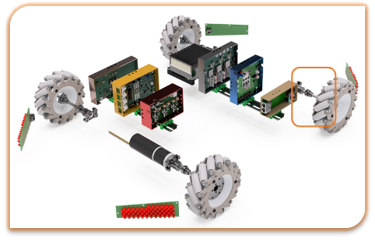
Sensorlösungen
Der autonome Roboter muss sehen, wohin er fährt: Er braucht also einen Bildsensor und ein Kameramodul. In unserer Demonstration wird ein E-con-USB-Kameramodul verwendet. Dieses nutzt einen Global-Shutter-Bildsensor, der sich ideal für autonome Roboter eignet. Diese Sensoren speichern die Pixeldaten in jedem Bild gleichzeitig. Diese Art von Sensoren ist frei von Bewegungsartefakten, wie sie bei Rolling-Shutter-Sensoren auftreten und daher ideal für den Einsatz in Fabrikhallen oder Lagerhäusern geeignet. Rolling-Shutter-Sensoren haben einen größeren Dynamikbereich als Global-Shutter-Sensoren und können daher besser bei extrem unterschiedlichen Lichtverhältnissen eingesetzt werden. Bei autonomen Robotern in Fabriken erlauben die Lichtverhältnisse jedoch den Einsatz von Global-Shutter-Sensoren. Der Bildsensor AR0234CS unterstützt Full-HD-Bilder mit einer Bildrate von sechzig Bildern pro Sekunde.
Bei autonomen Robotern mit beweglichen Armen steuern Servomotoren die Bewegung von Armen und Greifern. Das erfordert eine genaue Positionsrückmeldung. Wenn der autonome Roboter aus- und wieder eingeschaltet wird, ist es außerdem wichtig, die genaue Position des Arms zu kennen. Ein absoluter Positionssensor kann die Position des Arms zu jedem Zeitpunkt bestimmen. Optische Sensoren können dies zwar leisten, benötigen dazu aber viele externe Komponenten und reagieren empfindlich auf Temperaturschwankungen. Onsemi ist ein etablierter Anbieter von hochzuverlässigen kundenspezifischen Positionssensoren für den Automobilmarkt. Aus dieser Erfahrung heraus haben wir eine Lösung mit zwei induktiven Positionssensoren entwickelt, die den Sensor-Controller NCS32100 verwendet. Auf dieses Produkt werde ich etwas später in dieser Präsentation noch näher eingehen.
Weitere empfohlene Produkte

AR0234CSSM00SUKA0-CR
Details anzeigen
AR1335CSSM11SMKA0-CP
Details anzeigen
AR0822NPSC10SMTA0-DR
Details anzeigen
NCS32100XMNTXG
Details anzeigen
NCV75215DB001R2G
Details anzeigen
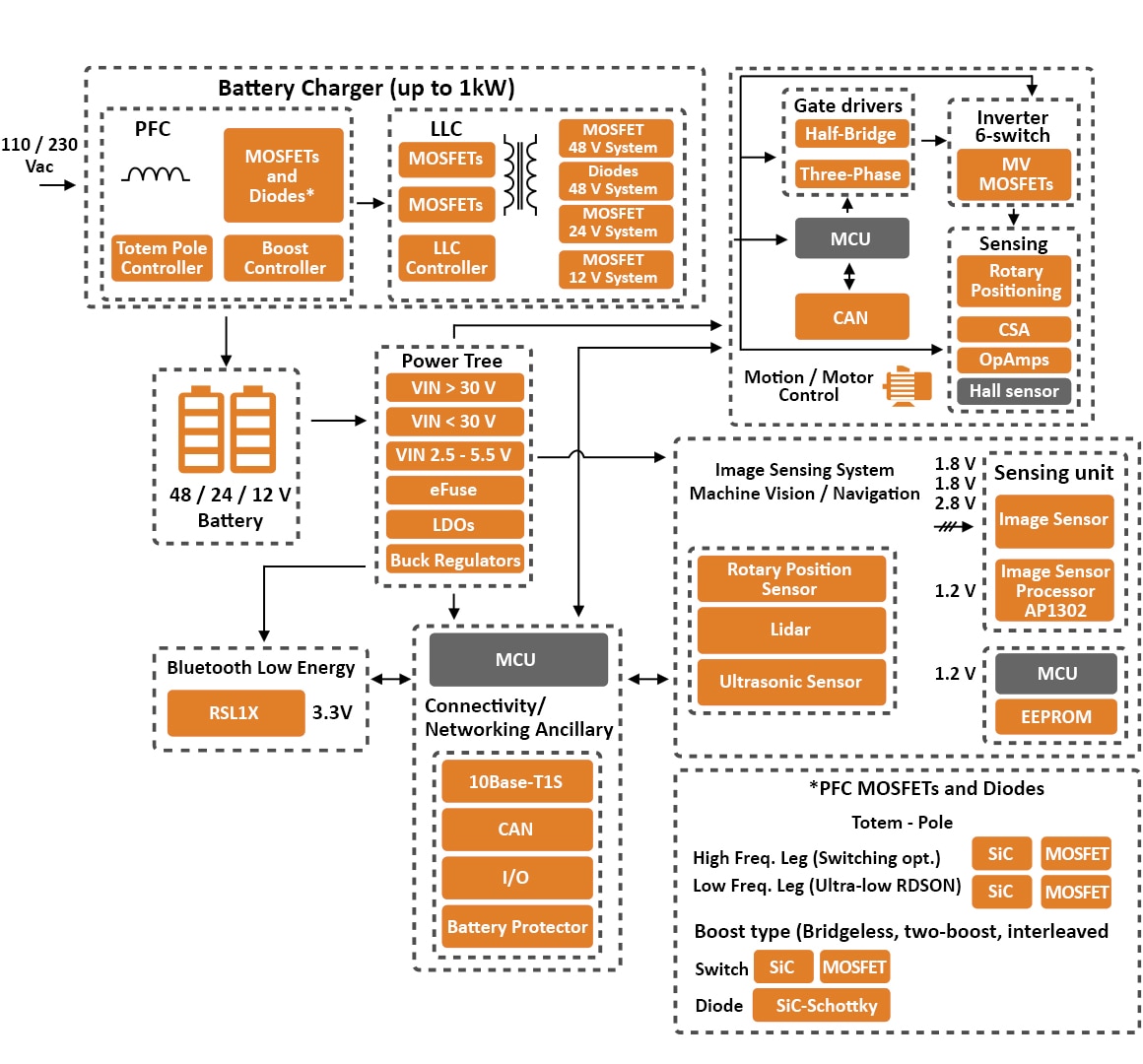
Stromversorgungslösungen
Schauen wir uns nun die Stromversorgung für den autonomen Roboter an. Sicherlich wird er von einer Batterie gespeist, aber die Batterie muss irgendwann aufgeladen werden. Der autonome Roboter verfügt über die Intelligenz, zur Stromladestation zu fahren. Ein externer Arm des Roboters verbindet das Kabel mit dem autonomen Roboter, um ihn aufzuladen.
Das 600-W-AC-Netzladegerät für den autonomen Roboter besteht aus drei Teilen: einer Leistungsfaktorkorrekturstufe (PFC-Stufe), einem isolierten LLC-Wandler und einem Abwärtswandler. Bei der PFC-Stufe handelt es sich um eine doppelt verschachtelte PFC-Stufe mit dem PFC-Regler NCP1632. Dadurch wird sichergestellt, dass die aus der Wechselstromleitung entnommene Leistung einen guten Leistungsfaktor und einen minimalen Gesamtklirrfaktor aufweist. Der LLC-Wandler wandelt das Ausgangssignal der PFC-Stufe, das etwa 400 VDC beträgt, in eine 48-V-DC-Ausgangsspannung um und verwendet dazu eine LLC-Topologie mit einer Halbbrückentopologie mit Mittelabgriff. Im aktuellen Design kommt der NCP1399 zum Einsatz, während für neuere Designs der fortschrittlichere NCP13994 empfohlen wird. Der Ausgang wird mit zwei Mittelspannungs-MOSFETs FDMS86202ET synchron gleichgerichtet, die von zwei Reglern NCP4305D für die Synchrongleichrichtung gesteuert werden.
Zu den Batterieladeprofilen gehören Konstantstrom-Lademodi, die zu einem breiten Spektrum an Betriebsspannungen führen. LLC-Stufen haben einen engen Betriebsbereich für ihr Spannungswandlungsverhältnis bzw. ihre Verstärkung, so dass sie im Konstantstrommodus nicht gut funktionieren. Im Ladegerät des autonomen Roboters gibt es eine dritte Abwärtsstufe mit dem FAN65008, die einen äußerst breiten Bereich von Spannungswandlungsverhältnissen unterstützt, so dass die für das Laden der Batterie erforderlichen Strom- und Spannungsprofile problemlos möglich sind.
Weitere empfohlene Produkte

NCP1681ABD2R2G
Details anzeigen) in 10-poligem DFN-Gehäuse (4x4)")
NCP51530BMNTWG
Details anzeigen
NCP51561BADWR2G
Details anzeigen 291 W (Tc), Durchsteckmontage, TO-247-3-Gehäuse")
NTHL045N065SC1
Details anzeigen
NCP13994AADR2G
Details anzeigen
NCP51561BADWR2G
Details anzeigen
NTHL045N065SC1
Details anzeigen
NCP4318ALSDR2G
Details anzeigen
NCP1076STAT3G
Details anzeigen
FAN65008B
Details anzeigen
FODM1008
Details anzeigen, 102 A (Tc) 3,3 W (Ta), 187 W (Tc) Oberflächenmontage, 8-poliges PQFN-Gehäuse (5x6)")
FDMS86202ET120
Details anzeigen
RSL15
Details anzeigen
Beleuchtungslösungen
Unsere autonome Roboterlösung ist mit LED-Leuchten ausgestattet, um Menschen und anderen Robotern ihre Anwesenheit zu signalisieren. Zusätzliche LED-Leuchten werden für die Signalisierung verwendet. Onsemi ist ein etablierter Anbieter von Lösungen für Scheinwerfer, Rückleuchten, Tagfahrlicht und Signalleuchten für den Automobil- und Industriefahrzeugmarkt. Wir haben zwei Produkte aus diesem breiten Portfolio für unseren autonomen Roboter ausgewählt.
Die LED-Rücklichtlösung NCV7685 für Kraftfahrzeuge ist eine einfach zu verwendende Lösung aus Treiber und integriertem MOSFET. Es gibt 12 parallele 60-mA-Kanäle, die über eine I2C-Schnittstelle PWM-gesteuert werden. Wenn der LED-Treiber ohne externen Mikrocontroller betrieben werden soll, können spezifische OTP-Register vorprogrammiert werden, um den Arbeitszyklus einzustellen. Der LED-Treiber verfügt über eine Fehlerdiagnose, die vom Mikrocontroller zurückgelesen werden kann, um bestimmte Fehler zu erkennen, z. B. Kurzschlussbedingungen an dem Pin, der den Strom einstellt, einen Fehler in der I2C-Kommunikation, eine thermische Warnung, eine thermische Abschaltung und eine Lastunterbrechung. Diese Informationen können vom Mikrocontroller für notwendige Korrekturmaßnahmen genutzt werden, wie z. B. die Rückmeldung des Fehlers an eine zentrale Host-Steuerung, die die lokalen autonomen Roboter überwacht.
Weitere empfohlene Produkte

NCV7685DQR2G
Details anzeigen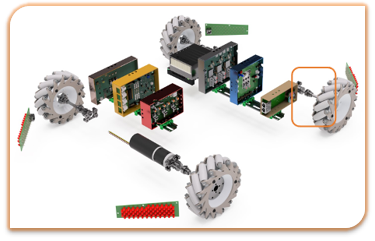
Kommunikationslösungen
Traditionell wählten Robotik-Zulieferer das CAN-Protokoll aus der Automobilindustrie für die kabelgebundene Kommunikation zwischen verschiedenen Knoten innerhalb des Roboters, darunter BLDC, Beleuchtung, Prozessor und einige Sensoren. CAN gibt es schon seit Jahrzehnten und es nutzt leichte und kostengünstige ungeschirmte verdrillte Doppelkabel (UTP) in einer Multidrop- oder Daisy-Chain-Topologie für die Kommunikation zwischen den einzelnen Knoten mit 2 MBit/s bis 5 MBit/s. Gleichzeitig muss die künstliche Intelligenz von Robotern verbessert werden, weil Roboter immer autonomer werden oder immer enger mit Menschen zusammenarbeiten. Die Intelligenz des Roboters wird durch zusätzliche Prozessoren und Sensoren ausgebaut, darunter Lidar, Bildsensoren, Ultraschall, Radar und induktive Positionserfassung. Bildsensoren und Lidar erfordern mehr Punkt-zu-Punkt-Kommunikationsverbindungen (P2P) zum Prozessorknoten, was höhere Datenraten wie Gigabit-Ethernet erfordert. Ein Nachteil von CAN ist, dass ein Gateway zwischen Ethernet und CAN vonnöten ist, da sich die Protokolle unterscheiden.
Im Jahr 2019 hat die Ethernet Alliance den IEEE802.3cg-Standard für 10BASE-T1S als „All-Ethernet”-Ersatz für CAN ratifiziert. 10BASE-T1S ermöglicht jetzt über dieselben zwei Adern (SPE: Single-Pair-Ethernet) eine zwei- bis dreimal schnellere Kommunikation als über CAN bei gleichzeitigem Wegfall zusätzlicher Gateway-Kosten und der Reduzierung des Gewichts dank der Controller NCN26010 oder NCN26000 von onsemi.
Weitere empfohlene Produkte

NCN26010
Details anzeigen
NCN26000
Details anzeigen
NCV7340
Details anzeigen
NCV7342
Details anzeigen
NCV7343
Details anzeigen
NCV7344
Details anzeigen
NCV7349
Details anzeigen
NCV7351
Details anzeigen
NCV7356
Details anzeigen
NCV7357
Details anzeigen
NCV7390
Details anzeigen
NCV7446
Details anzeigen
NCV7450
Details anzeigen

