Come le PMI possono utilizzare un metaverso industriale per esplorare e implementare rapidamente soluzioni robotiche
Contributo di Editori nordamericani di DigiKey
2024-11-21
I robot e i robot collaborativi (cobot) sono all'avanguardia nelle tecnologie di automazione industriale. I gemelli digitali e la realtà virtuale (VR) sono all'avanguardia tra gli strumenti di progettazione e sviluppo. Insieme, possono essere sfruttati per creare un metaverso industriale in grado di garantire una maggiore produttività in tempi più rapidi, anche per le piccole e medie imprese (PMI).
I progettisti presso molte PMI possono beneficiare di un'interfaccia semplice e intuitiva che combina un gemello digitale, un modello virtuale altamente dettagliato di un oggetto fisico come un robot delta, lineare o multiasse, e un ambiente VR tridimensionale (3D) per consentire l'esecuzione diretta e la verifica delle sequenze di movimento del robot.
L'utilizzo di queste funzioni supporta la messa a punto e l'ottimizzazione del sistema di automazione anche in assenza di hardware fisico e consente di esplorare rapidamente molteplici possibilità della soluzione.
Questo articolo esamina innanzitutto la distinzione tra un gemello digitale matematico, descritto dai dati, e un gemello digitale visivo (gemello VR) e come entrambi siano necessari per creare il metaverso industriale. Presenta quindi un sistema di controllo robotico e il relativo software di Igus che possono essere utilizzati per simulare un robot su un'interfaccia 3D (gemello digitale visivo) senza utilizzare hardware fisico, insieme a robot delta, lineari e multiasse compatibili che possono essere utilizzati per realizzare la soluzione ottimizzata.
I gemelli digitali e la VR sono tecnologie complementari che utilizzano forme di visualizzazione, interazioni e hardware diversi. I gemelli digitali sono modelli basati sui dati di oggetti, sistemi o processi fisici. Sono progettati per l'uso durante l'intero ciclo di vita dell'oggetto da modellare, dalla concezione iniziale allo smantellamento e al riciclaggio.
La VR è una tecnologia immersiva e visiva che utilizza anche modelli digitali. In un ambiente VR, è possibile simulare le relazioni e le interazioni tra gli oggetti, come un robot che esegue un'operazione. Quindi, sebbene entrambe le tecnologie possano essere utilizzate per la progettazione e la simulazione, la tecnologia dei gemelli digitali si concentra sulle considerazioni generali del ciclo di vita, mentre la VR si concentra sulle interazioni tra gli oggetti fisici.
Un metaverso combina gemelli digitali e VR in un ambiente virtuale creato appositamente che supporta interazioni in tempo reale tra gli oggetti digitali e le persone. È spesso associato al gioco d'azzardo, ma è sempre più applicato alle attività commerciali e industriali.
Benvenuti nell'iguverse
Igus ha sviluppato il metaverso iguverse per supportare le interazioni ingegneristiche in ambienti industriali, come lo sviluppo e l'implementazione di sistemi robotici. L'iguverse può essere implementato attraverso il software Igus Robot Control (iRC). Questa applicazione gratuita e che non richiede una licenza consente agli utenti di controllare vari tipi di robot, tra cui robot delta, cobot (bracci robotici) e robot a cavalletto.
Offre agli utenti un'interfaccia 3D e oltre 100 programmi di esempio. I requisiti di sistema per implementare iRC includono un PC (minimo una CPU Intel i5) con Windows 10 o 11 (64 bit) con 500 MB di spazio libero su disco e connettività di rete Ethernet o wireless.
Il cuore del software è un gemello digitale in 3D del robot da programmare. Un esempio è un robot a cavalletto lineare a tre assi come il modello DLE-RG-0001-AC-500-500-100 con un'area di lavoro di 500 x 500 x 100 mm o un attuatore XY a due assi come il modello DLE-LG-0012-AC-800-500 con un'area di lavoro di 800 x 500 mm (Figura 1). I progettisti possono definire i movimenti con pochi clic del mouse e utilizzare il modello 3D per assicurarsi che i movimenti richiesti siano fattibili, anche prima di acquistare il robot.
 Figura 1: Esempio di gemello digitale 3D VR di un robot a cavalletto a tre assi nell'iguverse. (Immagine per gentile concessione di Igus)
Figura 1: Esempio di gemello digitale 3D VR di un robot a cavalletto a tre assi nell'iguverse. (Immagine per gentile concessione di Igus)
Oltre al software iRC, il controller del robot è un elemento chiave dell'ambiente di sviluppo iguverse. Ad esempio, il modello IRC-LG12-02000 è per motori a 48 V, ha sette ingressi e sette uscite e presenta un cavo di 10 m per il collegamento al robot. I controller IRC includono moduli di azionamento di motori passo-passo bipolari di varie dimensioni e sono disponibili configurabili o preconfigurati. Dispone inoltre di diverse interfacce per l'integrazione dei sistemi, tra cui:
- Interfaccia del controller a logica programmabile (PLC) per il controllo tramite gli ingressi e le uscite digitali, in particolare per facilitare l'avvio e l'arresto dei programmi tramite un PLC o un pulsante
- Interfaccia Modbus TCP per il controllo tramite PLC o PC
- Common Robotic Interface (CRI) Ethernet per il controllo e la configurazione tramite PLC o PC
- Interfaccia del sistema operativo robotico (ROS) per il funzionamento del robot tramite ROS
- Interfaccia per telecamere di rilevamento oggetti
- Interfaccia cloud per il monitoraggio a distanza dello stato del robot
Cinematica supportata
L'iguverse supporta una serie di cinematiche (movimenti di base) che definiscono il movimento controllato del robot. Oltre alla cinematica preconfigurata, è possibile configurare in IRC fino ad altri tre assi cinematicamente indipendenti. La cinematica preconfigurata include:
- Robot delta a 2 e 3 assi
- Robot a cavalletto,
- 2 assi (assi X e Y)
- 2 assi (assi Y e Z)
- 3 assi (assi X, Y e Z)
- Bracci robotici (cobot),
- 3 assi (assi 1, 2, 3)
- 3 assi (assi 2, 3, 4)
- 4 assi (assi 1, 2, 3, 4)
- 4 assi (assi 2, 3, 4, 5)
- 5 assi (assi da 1 a 5)
- 6 assi (assi da 1 a 6)
- Robot SCARA a 4 assi
Facile programmazione per un'automazione a basso costo
I robot Igus e l'IRC sono progettati per supportare l'automazione a basso costo. Ciò non sarebbe possibile senza un'interfaccia di programmazione intuitiva. Un mouse a 3 tasti o un gamepad possono muovere e posizionare un robot nell'iguverse. Con il software IRC, l'utente può muovere liberamente tutti gli assi del gemello digitale nell'interfaccia 3D. Una funzione di autoapprendimento supporta lo sviluppo del software di controllo del robot, anche senza che sia collegato un robot fisico.
Per implementare l'autoapprendimento, l'utente sposta manualmente il robot virtuale nella posizione desiderata e ne definisce le modalità di spostamento. Il processo si ripete fino alla creazione del profilo di movimento completo. Il centro utensile nel software IRC consente agli utenti di aggiungere facilmente gli effettori terminali corrispondenti, come le pinze, e regola automaticamente il punto centrale dell'utensile sul robot. Inoltre, è possibile aggiungere un collegamento a un sistema di controllo industriale di livello superiore.
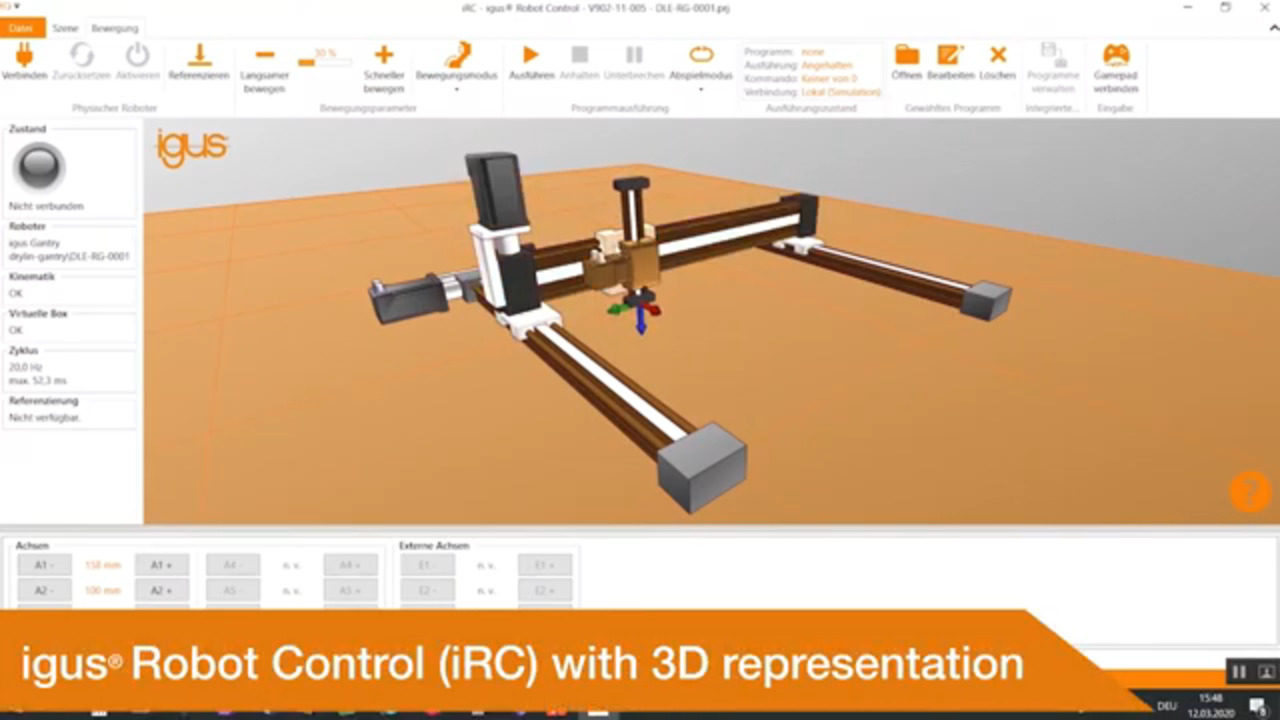
Il processo inizia con l'attivazione del robot utilizzando i pulsanti "connect", "reset" ed "enable", come richiesto dall'interfaccia. Il LED di stato dell'IRC dovrebbe diventare verde e lo stato dovrebbe indicare l'assenza di errori. Il profilo di movimento può essere inserito nella scheda "Jogging" (Figura 2).
 in the iguverse immersive development environment (click to enlarge)") Figura 2: La scheda "Jogging" (in basso a sinistra) dell'ambiente di sviluppo immersivo iguverse può essere utilizzata per inserire i profili di movimento. (Immagine per gentile concessione di Igus)
Figura 2: La scheda "Jogging" (in basso a sinistra) dell'ambiente di sviluppo immersivo iguverse può essere utilizzata per inserire i profili di movimento. (Immagine per gentile concessione di Igus)
Robot a cavalletto
I robot a cavalletto, come quelli inclusi negli esempi precedenti dell'iguverse, sono costituiti da due assi X di base, un asse Y e un asse Z opzionale. L'asse Y è collegato ai due assi X paralleli e si muove avanti e indietro nello spazio bidimensionale. L'asse Z opzionale supporta una terza dimensione di movimento.
I robot a cavalletto di Igus sono dotati di rivestimenti in plastica autolubrificanti che scorrono e rotolano in modo più fluido e silenzioso rispetto ai modelli tradizionali basati su cuscinetti a sfere. Il nuovo design è più leggero, resistente alla corrosione e non richiede manutenzione, qualità importanti per le PMI. Inoltre, questi robot, fondamentali per le PMI, costano fino al 40% in meno rispetto ai tradizionali robot a cavalletto, garantendo una più rapida redditività del capitale investito (ROI).
Questi robot sono adatti a due classi di applicazioni: basse velocità con carichi elevati o alte velocità con carichi bassi. Le applicazioni più rappresentative includono il confezionamento, il pick-and-place, l'etichettatura, la movimentazione dei materiali e le operazioni di assemblaggio.
Sono disponibili in varie dimensioni. Tra gli accessori disponibili vi sono giunti, effettori terminali e flange per motori. Esempi di robot a cavalletto di medie dimensioni sono:
- DLE-FG-0006-AC-650-650 è un cavalletto piatto bidimensionale con un'area di lavoro di 650 x 650 mm. Questo robot può gestire carichi fino a 8 kg e ha una velocità dinamica fino a 20 prelievi al minuto.
- DLE-RG-0012-AC-800-800-500 è un cavalletto tridimensionale con un'area di lavoro di 800 x 800 x 500 mm. Può gestire carichi fino a 10 kg con una velocità dinamica fino a 20 prelievi al minuto.
Competenza nella pallettizzazione
La pallettizzazione dei prodotti per la spedizione è un'attività quotidiana nelle operazioni di produzione e logistica. Il nuovo e più grande membro dell'iguverse è il robot a cavalletto di grandi dimensioni XXL con un'area di lavoro di 2000 x 2000 x 1500 mm, adatto ad applicazioni di pallettizzazione fino a 10 kg. Sono disponibili progetti personalizzati con aree di lavoro fino a 6000 x 6000 x 1500 mm.
Questi robot a cavalletto possono prelevare pezzi fino a 10 kg, trasportarli a una velocità massima di 500 mm/s e posizionarli su un pallet con una ripetibilità di 0,8 mm (Figura 3). La soluzione robotica di pallettizzazione di Igus costa fino al 60% in meno rispetto a sistemi analoghi.
 Figura 3: La pallettizzazione è un'attività comune e importante nelle operazioni di produzione e logistica e può essere automatizzata utilizzando un robot a cavalletto. (Immagine per gentile concessione di Igus)
Figura 3: La pallettizzazione è un'attività comune e importante nelle operazioni di produzione e logistica e può essere automatizzata utilizzando un robot a cavalletto. (Immagine per gentile concessione di Igus)
Robot delta
Come i robot a cavalletto, i robot delta sono disponibili con due o tre assi. I robot delta hanno un involucro di lavoro a cupola montato sopra l'area di lavoro. Hanno velocità eccezionalmente elevate e sono spesso utilizzati per la movimentazione dei materiali e il posizionamento dei pezzi. Tra gli esempi di robot delta di Igus vi sono:
- RBTX-IGUS-0047 è un modello a tre assi con un diametro dell'area di lavoro di 660 mm. Ha una precisione di ±0,5 mm, un carico utile massimo di 5 kg, una velocità massima di 0,7 m/s e può eseguire fino a 30 prelievi al minuto. (Figura 4).
- RBTX-IGUS-0059 è un modello a 2 assi con un diametro dell'area di lavoro di 700 mm e una precisione di ±0,5 mm. Il carico massimo è di 5 kg, la velocità massima è di 2 m/s e può eseguire fino a 50 prelievi al minuto.
 Figura 4: Esempio di robot a tre assi delta accanto a un iRC di Igus (a sinistra). (Immagine per gentile concessione di DigiKey)
Figura 4: Esempio di robot a tre assi delta accanto a un iRC di Igus (a sinistra). (Immagine per gentile concessione di DigiKey)
Cobot a braccio snodabile
L'iguverse supporta anche i cobot a braccio snodabile. I cobot possono avere da due a 10 o più assi, detti anche gradi di libertà (DOF). In genere operano in ampie aree di lavoro e possono svolgere compiti complessi in collaborazione con una persona. Il modello REBEL-6DOF-02 di Igus ha 6 DOF, mentre il modello REBEL-4DOF-02 ha 4 DOF. Entrambi hanno una precisione di ±1 mm, un campo di lavoro nominale di 400 mm e sono in grado di eseguire un minimo di 7 prelievi al minuto con una velocità lineare di 200 mm/s.
Il modello a 6 DOF ha un carico utile massimo di 2 kg e uno sbraccio massimo di 664 mm. Il modello a 4 DOF ha un carico utile massimo di 3 kg e uno sbraccio massimo di 495 mm (Figura 5).
 and 6 DOF (right)") Figura 5: Cobot a braccio snodabile con 4 DOF (a sinistra) e 6 DOF (a destra). (Immagine per gentile concessione di Igus)
Figura 5: Cobot a braccio snodabile con 4 DOF (a sinistra) e 6 DOF (a destra). (Immagine per gentile concessione di Igus)
Conclusione
Il metaverso industriale immersivo iguverse combina i gemelli digitali e la VR per fornire strumenti che consentono lo sviluppo e l'implementazione rapida di soluzioni robotiche. È gratuito, non richiede una licenza ed è progettato per l'esecuzione locale su un PC senza connessione al cloud. Può essere utilizzato per sviluppare e testare soluzioni robotiche senza la presenza di un robot.
Supporta un'ampia gamma di cinematiche di robot delta e a cavalletto, bracci robotici (cobot) e robot SCARA. L'IRC comprende una serie di interfacce per supportare l'automazione e le esigenze operative, tra cui l'interfaccia PLC, Modbus TCP/IP, CRI Ethernet, l'interfaccia ROS, un'interfaccia per telecamere di rilevamento degli oggetti e un'interfaccia cloud. L'iguverse, l'iRC e i relativi robot di Igus sono stati ottimizzati per supportare le esigenze di automazione a basso costo delle PMI.
Esonero della responsabilità: le opinioni, le convinzioni e i punti di vista espressi dai vari autori e/o dai partecipanti al forum su questo sito Web non riflettono necessariamente le opinioni, le convinzioni e i punti di vista di DigiKey o le sue politiche.