Come implementare rapidamente moduli GNSS multicostellazione per il posizionamento
Contributo di Editori nordamericani di DigiKey
2021-09-09
L'uso di funzioni basate sulla posizione mediante ricevitori del sistema di navigazione satellitare globale (GNSS) per i sistemi di navigazione satellitare Galileo (Europa), GPS (Stati Uniti), GLONASS (Russia), BeiDou (Cina) e QZSS (Giappone) sta crescendo in una gamma di applicazioni quali robotica, veicoli autonomi, automazione industriale, logistica e tracciamento delle risorse, droni e attrezzature agricole e veicoli pesanti per l'edilizia. I benefici dell'utilizzo di ricevitori GNSS multicostellazione includono una migliore disponibilità dei segnali di posizione, navigazione e temporizzazione (PNT), una maggiore precisione e integrità e una migliore robustezza dell'applicazione.
Ma lo sviluppo di ricevitori multicostellazione è un'attività lunga e complessa che comprende: l'ottimizzazione dell'antenna in banda L; la progettazione del front-end a radiofrequenza (RF); l'integrazione degli algoritmi di elaborazione del segnale in banda base per acquisire, tracciare e applicare correzioni ai vari segnali PNT; la codifica del software di elaborazione dell'applicazione per estrarre i dati PNT da ciascun canale della banda base e l'utilizzo delle informazioni per implementare le funzioni del sistema. I progettisti devono anche scegliere un'antenna appropriata e posizionarla correttamente.
In alternativa, i progettisti possono optare per ambienti di sviluppo e moduli GNSS pre-ingegnerizzati per integrare in modo rapido ed efficiente la capacità di posizionamento in un sistema. Questi moduli GNSS includono il front-end RF, l'elaborazione della banda base e il firmware embedded per accelerare lo sviluppo del software di elaborazione delle applicazioni. Alcuni moduli GNSS includono anche le antenne.
Questo articolo passa in rassegna i principi base del GNSS, del PNT, nonché del funzionamento dei ricevitori GNSS multicostellazione. Quindi esamina i pro e i contro dell'integrazione delle antenne nei moduli GNSS prima di presentare diversi moduli GNSS, con e senza antenne integrate, nonché le schede di valutazione associate di STMicroelectronics, Septentrio e Würth Elektronik che i progettisti possono applicare per lo sviluppo efficiente ed economico di applicazioni basate sulla posizione accurate e robuste.
Cosa sono il GNSS e il PNT?
GNSS e PNT sono concetti strettamente correlati. I satelliti GNSS sono la fonte più comune di segnali PNT. I satelliti GNSS sono essenzialmente clock sincronizzati molto precisi che trasmettono costantemente le loro informazioni PNT. Un modulo GNSS riceve i segnali PNT da un determinato satellite e calcola la propria distanza da quel satellite. Conoscendo la distanza di almeno quattro satelliti, il ricevitore può stimare la propria posizione. Tuttavia, la precisione della posizione stimata è influenzata da una varietà di fonti di errore, quali:
- Deriva di clock del circuito di temporizzazione nei satelliti GNSS
- Imprecisioni nella previsione della posizione orbitale esatta dei satelliti GNSS
- Deriva delle prestazioni generali dell'attrezzatura satellitare complessiva rispetto ad altri satelliti, altrimenti nota come bias del satellite
- Distorsioni e ritardi nella trasmissione del segnale nel momento in cui attraversa la ionosfera e la troposfera
- Riflessione a percorsi multipli e deriva e prestazioni variabili nel ricevitore
Ci sono varie tecniche a disposizione dei progettisti per correggere gli errori GNSS satellitari e atmosferici.
Miglioramento delle prestazioni GNSS
Il modo migliore per ridurre al minimo l'impatto degli errori che hanno origine nel ricevitore GNSS è utilizzare il ricevitore dalle prestazioni più alte che si adatti ai vincoli di costo e dimensioni di una determinata applicazione. Purtroppo neanche i ricevitori ad alte prestazioni sono perfetti; con ogni probabilità le loro prestazioni possono essere migliorate. È importante comprendere questi metodi di correzione, poiché offrono prestazioni variabili e alcuni moduli GNSS non sono in grado di implementarli tutti.
Le stazioni di riferimento a terra sono utilizzate da molti metodi di correzione GNSS (Figura 1). I metodi più consolidati per utilizzare le stazioni di riferimento a terra per fornire correzioni GNSS ai ricevitori sono Real-Time Kinematic (RTK) e Precise Point Positioning (PPP). Più recentemente, sono diventati disponibili metodi ibridi RTK-PPP.
 Figura 1: Un ricevitore utente GNSS può ottenere informazioni su atmosfera, clock ed errori di orbita da una rete di riferimento per migliorare la precisione del posizionamento. (Immagine per gentile concessione di Septentrio)
Figura 1: Un ricevitore utente GNSS può ottenere informazioni su atmosfera, clock ed errori di orbita da una rete di riferimento per migliorare la precisione del posizionamento. (Immagine per gentile concessione di Septentrio)
Il metodo RTK si basa su una singola stazione base o su una rete di riferimento locale per i dati di correzione che possono eliminare la maggior parte degli errori GNSS. L'RTK presuppone che la stazione base e il ricevitore siano situati molto vicini (a un massimo di 40 chilometri) in modo che sperimentino gli stessi errori. Il metodo Post-Processed Kinematic o PPK è una variante dell'RTK ed è ampiamente utilizzato nel rilevamento e nella mappatura per ottenere dati di posizionamento ad alta precisione o accuratezza al centimetro.
Solo gli errori di orbita e di clock del satellite vengono utilizzati per fare le correzioni PPP. Questi errori specifici del satellite sono indipendenti dalla posizione dell'utente, il che limita il numero di stazioni di riferimento necessarie. Tuttavia, il metodo PPP non tiene conto degli errori legati all'atmosfera e quindi ha una precisione inferiore rispetto all'RTK. Inoltre, le correzioni PPP possono avere tempi di inizializzazione di circa 20 minuti. Il tempo di inizializzazione più lungo e la minore precisione rendono il PPP impraticabile per molte applicazioni.
Le applicazioni che hanno bisogno di un'accuratezza vicina all'RTK e di tempi di inizializzazione rapidi spesso impiegano il più recente servizio di correzione GNSS, RTK-PPP (a volte indicato come rappresentazione dello spazio di stato, o SSR). Utilizza una rete di riferimento con stazioni distanziate di circa 100 km che raccoglie dati GNSS e calcola una combinazione di correzioni satellitari e atmosferiche. La rete di riferimento utilizza reti Internet, satellitari o di telefonia mobile per inviare i dati di correzione agli abbonati. I ricevitori GNSS che utilizzano l'RTK-PPP possono ottenere precisione inferiore al decimetro. La scelta di utilizzare i metodi di correzione RTK, PPP e RTK-PPP comporta una serie di compromessi di progettazione che gli sviluppatori devono esaminare per scegliere la soluzione ottimale per lo specifico profilo dell'applicazione (Figura 2).
 Figura 2: Punti di forza e di debolezza di tre comuni metodi di correzione GNSS. (Immagine per gentile concessione di Septentrio)
Figura 2: Punti di forza e di debolezza di tre comuni metodi di correzione GNSS. (Immagine per gentile concessione di Septentrio)
I sistemi basati su satellite (SBAS) stanno iniziando a diventare disponibili su base regionale per sostituire i metodi di correzione RTK, PPP e RTK-PPP basati sulle stazioni di terra. Il sistema SBAS utilizza sempre le stazioni di terra per misurare gli errori GNSS, ma tali stazioni sono sparse su interi continenti. Gli errori misurati vengono elaborati in una posizione centrale in cui le correzioni vengono calcolate e trasmesse ai satelliti geosincroni sull'area coperta. I dati di correzione vengono trasmessi dai satelliti come una sovrapposizione o "augmentation" dei dati GNSS originali.
La precisione GNSS dipende dalla disponibilità e dall'accuratezza delle misurazioni satellitari e delle correzioni associate. I ricevitori GNSS ad alte prestazioni tracciano i segnali GNSS a più frequenze e usano costellazioni GNSS multiple e vari metodi di correzione per fornire la precisione e la resilienza necessarie. La ridondanza risultante consente prestazioni stabili anche se alcuni dei dati e delle misurazioni satellitari subiscono interferenze. I progettisti possono scegliere tra una varietà di capacità di precisione e ridondanza GNSS (Figura 3).
 Figura 3: Gradi di precisione GNSS con metodi di correzione corrispondenti e applicazioni selezionate. (Immagine per gentile concessione di Septentrio)
Figura 3: Gradi di precisione GNSS con metodi di correzione corrispondenti e applicazioni selezionate. (Immagine per gentile concessione di Septentrio)
Moduli GNSS: confronto tra antenne integrate ed esterne
A causa della complessità del posizionamento multicostellazione, vari fornitori hanno messo a disposizione moduli che aiutano ad accelerare il time-to-market, ad abbassare i costi e ad assicurare le prestazioni. Detto questo, i progettisti devono valutare se utilizzare un'antenna interna o invece optare per una che risiede all'esterno del modulo GNSS. Per le applicazioni in cui il time-to-market e i costi sono una priorità, un'antenna integrata può essere preferibile, in quanto le attività di progettazione e sviluppo connesse sono significativamente inferiori. Per le applicazioni che hanno bisogno della certificazione FCC o CE, l'uso di un modulo con un'antenna integrata può anche accelerare il processo di approvazione. Tuttavia, le dimensioni della soluzione possono aumentare e la flessibilità può essere limitata con soluzioni di antenne integrate.
Le antenne esterne forniscono ai progettisti una gamma più ampia di prestazioni e opzioni di layout. È possibile scegliere un'antenna ad alte prestazioni di grandi dimensioni oppure un'antenna più piccola ma meno performante. Inoltre, il posizionamento dell'antenna è più flessibile rispetto alla posizione del modulo GNSS, migliorando ulteriormente la flessibilità del progetto. La flessibilità di posizionamento permette anche alle antenne esterne di fornire un funzionamento GNSS più affidabile. Tuttavia, il posizionamento dell'antenna e l'instradamento della connessione possono essere un processo lungo e complesso e richiedono competenze specifiche, aumentando potenzialmente i costi e rallentando il time-to-market.
Minuscolo modulo GNSS per progetti con limiti di spazio
I team di progettazione con l'esperienza necessaria nel posizionamento e nell'instradamento dell'antenna possono utilizzare Teseo-LIV3F di STMicroelectronics, un modulo GNSS multicostellazione (GPS/Galileo/GLONASS/BeiDou/QZSS) che utilizza un'antenna esterna (Figura 4). Il modulo viene fornito in un contenitore LCC-18 che misura 9,7 x 10,1 mm; offre precisione di determinazione della posizione con probabilità di errore circolare (CEP) di 1,5 m, con un TTFF (Time-To-First-Fix) per l'avvio a freddo e a caldo rispettivamente inferiori a 32 secondi (GPS) e a 1,5 secondi (GLONASS). Ha un consumo energetico in standby di 17 µW e un consumo di energia durante il tracciamento di 75 mW.
 Figura 4: Il modulo GNSS Tesco-LIV3F include il core GNSS e i sottosistemi, più tutta la connettività e la gestione della potenza necessarie, in un contenitore che misura 9,7 x 10,1 mm. Richiede un'antenna esterna. (Immagine per gentile concessione di STMicroelectronics)
Figura 4: Il modulo GNSS Tesco-LIV3F include il core GNSS e i sottosistemi, più tutta la connettività e la gestione della potenza necessarie, in un contenitore che misura 9,7 x 10,1 mm. Richiede un'antenna esterna. (Immagine per gentile concessione di STMicroelectronics)
L'oscillatore a cristallo termocompensato (TCXO) da 26 MHz integrato in Tesco-LIV3F aiuta a garantire alta precisione, mentre l'oscillatore a clock in tempo reale (RTC) da 32 kHz dedicato permette un TTFF ridotto. Caratteristiche quali registrazione dati, GNSS assistito autonomo per sette giorni, riconfigurabilità e aggiornamenti del firmware sono rese possibili grazie alla memoria flash integrata da 16 Mbit.
Le applicazioni adatte per Tesco-LIV3F includono assicurazioni, logistica, droni, pedaggi, sistemi antifurto, localizzazione di persone e animali domestici, localizzazione di veicoli e chiamate di emergenza.
In quanto soluzione pre-certificata, l'uso del modulo Teseo-LIV3F può consentire un ridotto time-to-market dell'applicazione finale. Vanta un intervallo della temperatura di funzionamento da -40 a +85 °C.
Per sperimentare il modulo e accelerare lo sviluppo delle applicazioni, i progettisti possono utilizzare la scheda di valutazione AEK-COM-GNSST31. Se utilizzato insieme al firmware X-CUBE-GNSS1, il pacchetto di valutazione può supportare le funzionalità di acquisizione, tracciamento, navigazione e output dei dati senza memoria esterna. Questa EVB è progettata anche per l'uso con un microcontroller SPC5 per lo sviluppo di applicazioni automotive.
Modulo GNSS con mitigazione delle interferenze
Il ricevitore GNSS multicostellazione mosaic-X5 410322 di Septentrio è un modulo per montaggio superficiale a bassa potenza che misura 31 x 31 x 4 mm e fornisce ai progettisti una serie di interfacce, comprese quattro UART, Ethernet, USB, SDIO e due GPIO programmabili dall'utente.
Progettato per l'uso nella robotica, nei sistemi autonomi e in altre applicazioni di massa, mosaic-X5 ha una frequenza di aggiornamento di 100 Hz, una latenza inferiore a 10 ms e una precisione di determinazione della posizione RTK verticale e orizzontale di 0,6 cm e 1 cm, rispettivamente. Può tracciare tutte le costellazioni GNSS, supportando i segnali attuali e futuri, ed è compatibile con i metodi di correzione PPP, SSR, RTK e SBAS. Il TTFF del modulo è inferiore a 45 s per l'avvio a freddo e inferiore a 20 s per l'avvio a caldo.
mosaic-X5 è dotato di varie tecnologie brevettate di Septentrio, inclusa AIM+, una tecnologia integrata di mitigazione delle interferenze che sopprime una varietà di interferenze, dai semplici segnali continui a banda stretta ai complessi jammer a banda larga e pulsati.
Le interfacce, i comandi e i messaggi di dati dei moduli sono corredati da ampia documentazione. Il software RxTools incluso consente la configurazione e il monitoraggio del ricevitore, nonché la registrazione e l'analisi dei dati.
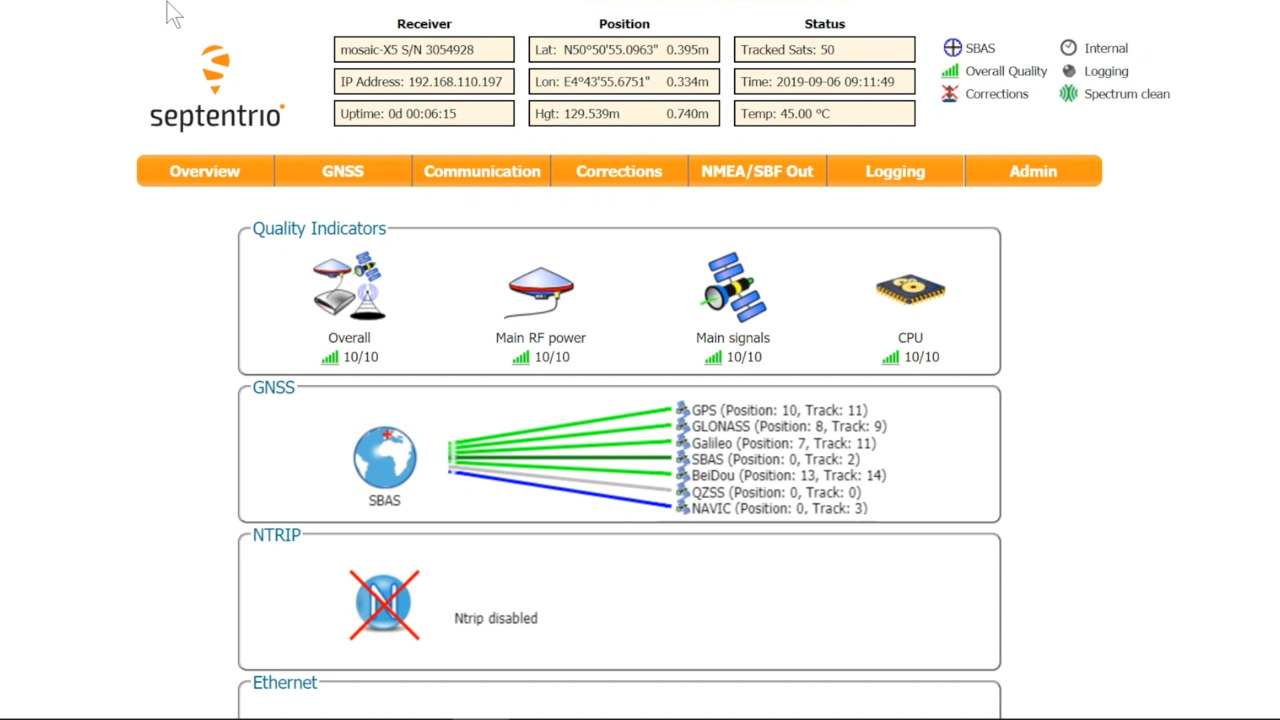
Il kit di sviluppo mosaic-X5 410331P3161 di Septentrio consente ai progettisti di esplorare, valutare e sviluppare prototipi che sfruttino appieno le capacità di mosaic-X5 (Figura 5).
 Figura 5: I progettisti possono creare un prototipo utilizzando il kit di sviluppo mosaic-X5 410331P3161 servendosi di una varietà di connessioni, tra cui Ethernet, porte COM o USB 2.0, oppure di una scheda di memoria SD. (Immagine per gentile concessione di Septentrio)
Figura 5: I progettisti possono creare un prototipo utilizzando il kit di sviluppo mosaic-X5 410331P3161 servendosi di una varietà di connessioni, tra cui Ethernet, porte COM o USB 2.0, oppure di una scheda di memoria SD. (Immagine per gentile concessione di Septentrio)
Il kit utilizza l'interfaccia utente Web intuitiva di mosaic-X5 per utilizzo e monitoraggio agevoli, che consente ai progettisti di controllare il modulo ricevitore da qualsiasi computer o dispositivo mobile. L'interfaccia Web utilizza indicatori di qualità di facile lettura per monitorare il funzionamento del ricevitore.
I progettisti possono creare un prototipo integrando il kit di sviluppo mosaic utilizzando una qualsiasi delle seguenti connessioni: Ethernet, porte COM, USB 2.0, scheda di memoria SD.
Modulo GNSS con antenna integrata
Per i progettisti di applicazioni che possono beneficiare dell'uso di un modulo GNSS con un'antenna integrata, Würth Elektronik offre il modulo Erinome-I 2614011037000 con un System-on-Chip (SoC) ad alte prestazioni (Figura 6). Il modulo supporta le costellazioni GNSS GPS, GLONASS, Galileo e BeiDou, e viene fornito con un'antenna integrata sulla parte superiore che semplifica l'integrazione dell'hardware e riduce il time-to-market. Il modulo, compresa l'antenna integrata, misura 18 x 18 mm.
 Figura 6: Erinome-I 2614011037000 di Würth Elektronik è un modulo GNSS completo con un SoC GNSS ad alte prestazioni più un'antenna integrata. (Immagine per gentile concessione di Würth Elektronik)
Figura 6: Erinome-I 2614011037000 di Würth Elektronik è un modulo GNSS completo con un SoC GNSS ad alte prestazioni più un'antenna integrata. (Immagine per gentile concessione di Würth Elektronik)
Sono inclusi nel modulo anche il TCXO, il filtro RF, l'amplificatore a basso rumore (LNA) e la memoria flash seriale.
Würth offre anche la scheda di valutazione (EVB) 2614019037001 per Erinome-I (Figura 7). L'EVB può anche servire come progetto di riferimento per l'integrazione del modulo GNSS in un'applicazione. Per collegare l'EVB a un PC può essere utilizzata una porta USB. Un connettore multi-pin permette ai progettisti di accedere a tutti i pin del modulo GNSS.
 Figura 7: La scheda di valutazione 2614019037001 per Erinome-I (vicino al centro della scheda, con l'antenna integrata visibile al centro del modulo) funge anche da progetto di riferimento. (Immagine per gentile concessione di Würth Elektronik)
Figura 7: La scheda di valutazione 2614019037001 per Erinome-I (vicino al centro della scheda, con l'antenna integrata visibile al centro del modulo) funge anche da progetto di riferimento. (Immagine per gentile concessione di Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) è un semplice strumento per PC che consente di interagire con il modulo GNSS Erinome-I utilizzando l'interfaccia UART. Supporta:
- Controllo del funzionamento dell'EVB
- Comunicazione bidirezionale con il modulo Erinome-I
- Valutazione delle caratteristiche e delle capacità di Erinome-I
- Familiarizzazione con i protocolli, le frasi e i comandi di Erinome-I
- Configurazione di Erinome-I senza conoscenza dei protocolli
- Parsing di frasi e comandi usati da Erinome-I
WENSS permette l'agevole valutazione delle applicazioni di posizionamento senza disporre di conoscenze avanzate. Gli sviluppatori esperti possono anche usare WENSS per configurazioni più avanzate.
Conclusione
Il modo migliore per ottenere la capacità di posizionamento preciso e affidabile è utilizzare costellazioni multiple con il supporto della tecnologia di correzione associata. Si tratta di sistemi complessi, ma i progettisti possono optare per moduli GNSS pre-ingegnerizzati, kit di sviluppo associati e ambienti per confrontare in modo rapido ed efficiente le varie opzioni disponibili e implementare caratteristiche e servizi basati sulla posizione.
Letture consigliate
Esonero della responsabilità: le opinioni, le convinzioni e i punti di vista espressi dai vari autori e/o dai partecipanti al forum su questo sito Web non riflettono necessariamente le opinioni, le convinzioni e i punti di vista di DigiKey o le sue politiche.