I nuovi attuatori piezoelettrici offrono riscontro aptico potenziato ai progetti con touchscreen portatili
Contributo di Editori nordamericani di DigiKey
2020-02-13
Le interfacce utente touchscreen sono sempre più onnipresenti grazie ai loro vantaggi rispetto alle interfacce meccaniche. Per i consumatori, l'interfaccia è agile e intuitiva e per gli utenti industriali un display sigillato evita i problemi dovuti all'ingresso di sporcizia e umidità. Ma ci sono anche risvolti negativi. Ad esempio, i consumatori potrebbero perdere la comodità e la soddisfazione che derivano dal clic di un interruttore meccanico, mentre gli utenti industriali possono far fatica a confermare la pressione di un pulsante sul touchscreen se hanno la mano guantata.
Il riscontro aptico, in base al quale la vibrazione indica il funzionamento dei pulsanti, è stato utilizzato per ovviare alla mancata sensibilità dei touchscreen ma le soluzioni esistenti tendono a utilizzare sistemi meccanici ingombranti e complessi, come i motori a vibrazione con massa eccentrica rotante (ERM) e gli attuatori risonanti lineari (LRA). Il riscontro aptico piezoelettrico è un'alternativa più compatta e flessibile. Tuttavia fino a poco tempo fa, le alte tensioni operative ne rendevano difficile l'uso in applicazioni a basso consumo energetico, un requisito fondamentale per i prodotti finali alimentati a batteria.
I progressi nelle soluzioni aptiche piezoelettriche ad "alta definizione" non solo affrontano i problemi di consumo energetico ma comportano anche altri vantaggi per la progettazione di un'interfaccia aptica, ad esempio il fattore di forma compatto e il profilo ribassato, il chiaro riscontro e tempi di risposta brevi.
Questo articolo esplora brevemente i vantaggi dei nuovi attuatori aptici piezoelettrici rispetto agli ERM e agli LRA prima di presentare una nuova generazione di dispositivi basati su strutture multistrato e modalità di pilotaggio bipolari che, insieme a driver efficienti e dedicati, risolvono i suddetti problemi di consumo energetico. L'articolo mostra quindi come uno sviluppatore può trarre vantaggio da questi attuatori e driver nei futuri prodotti di riscontro aptico su touchscreen usando esempi aptici di TDK e driver di Boréas Technologies e di Texas Instruments (TI).
Opzioni di riscontro aptico
I progettisti che desiderano aggiungere il riscontro aptico a un'interfaccia touchscreen hanno tre opzioni: ERM, LRA e attuatori piezoelettrici. Tutti e tre funzionano applicando lo stesso principio, in base al quale un microcontroller controlla il funzionamento e un driver controlla un attuatore per generare la vibrazione (Figura 1). Le differenze stanno nel modo in cui viene generata la vibrazione: un ERM utilizza un peso rotante decentrato, un LRA utilizza un peso magnetico sospeso per mezzo di molle elicoidali e un dispositivo piezoelettrico si basa sull'effetto piezoelettrico (inverso) che provoca un cambiamento dimensionale a un oggetto di cristallo o ceramica quando viene sottoposto a un campo elettrico.
 Figura 1: I sistemi touchscreen aptici comprendono un microcontroller, un driver e un attuatore. In questo esempio, l'attuatore è un dispositivo piezoelettrico, ma gli ERM e gli LRA sono alternative diffuse. (Immagine per gentile concessione di Boréas Technologies)
Figura 1: I sistemi touchscreen aptici comprendono un microcontroller, un driver e un attuatore. In questo esempio, l'attuatore è un dispositivo piezoelettrico, ma gli ERM e gli LRA sono alternative diffuse. (Immagine per gentile concessione di Boréas Technologies)
Gli ERM e gli LRA sono una scelta diffusa per i progetti portatili, soprattutto perché sono un'opzione a bassa tensione (circa 3 V) e richiedono una progettazione semplice del driver. Al contrario, i dispositivi piezoelettrici tradizionali richiedono tensioni molto più elevate (fino a 200 V) per generare una deformazione meccanica sufficiente per l'interazione con il consumatore. Queste alte tensioni sono necessarie perché la tecnologia tradizionale dei driver aptici piezoelettrici è una versione ridotta della tecnologia usata per gli amplificatori audio e quindi non è stata concepita da zero appositamente su criteri di bassa potenza. Un'ulteriore sfida di progettazione finora è stata la mancanza di driver dedicati per gli attuatori aptici a bassa potenza, che ha costretto i progettisti ad adottare soluzioni meno efficienti.
Tuttavia, uno dei principali vantaggi delle soluzioni piezoelettriche è il fatto che supportano dispositivi aptici ad alta definizione che migliorano il riscontro al di là della semplice vibrazione monotona. Ad esempio, gli attuatori piezoelettrici possono produrre vibrazioni a frequenza e ampiezza variabili e possono essere utilizzati per indicare risultati diversi dalla pressione di un singolo pulsante (Figura 2).
") Figura 2: Gli attuatori aptici piezoelettrici offrono varie vibrazioni utili per indicare risultati diversi dalla pressione di un singolo pulsante. (Immagine per gentile concessione di Boréas Technologies)
Figura 2: Gli attuatori aptici piezoelettrici offrono varie vibrazioni utili per indicare risultati diversi dalla pressione di un singolo pulsante. (Immagine per gentile concessione di Boréas Technologies)
In breve, le soluzioni di riscontro aptico ad alta definizione richiedono:
- Ampia larghezza di banda: per abilitare varie frequenze e modalità vibrazionali
- Alta accelerazione [g]: per una forza di riscontro superiore
- Grande spostamento: che aumenta la sensibilità del riscontro aptico
- Bassa latenza: tempi di risposta brevi aumentano la gamma di riscontro
La Tabella 1 riassume le prestazioni di ciascuna soluzione di riscontro aptico e dimostra che le soluzioni piezoelettriche sono l'unica scelta per applicazioni ad alta definizione, perché offrono la combinazione necessaria di larghezza di banda, forza di riscontro, sensibilità e latenza.
|
Tabella 1: Confronto delle caratteristiche operative delle soluzioni di riscontro aptico. I dispositivi piezoelettrici offrono la buona accelerazione (misurata in 'g' dove 1 g è l'accelerazione dovuta alla gravità sulla superficie terrestre (9,81 m/s2)), lo spostamento e il tempo di risposta e le forme d'onda personalizzate necessari per il riscontro aptico ad alta definizione. (Immagine per gentile concessione di DigiKey, tramite l'autore)
Si noti che parte della complessità di un driver per attuatori piezoelettrici deriva dalla funzionalità aggiuntiva necessaria per generare le forme d'onda personalizzate per la definizione e il contesto del riscontro aptico. Gli ERM e gli LRA non supportano forme d'onda personalizzate, quindi i driver sono più semplici.
I vantaggi dei nuovi dispositivi piezoelettrici di riscontro aptico
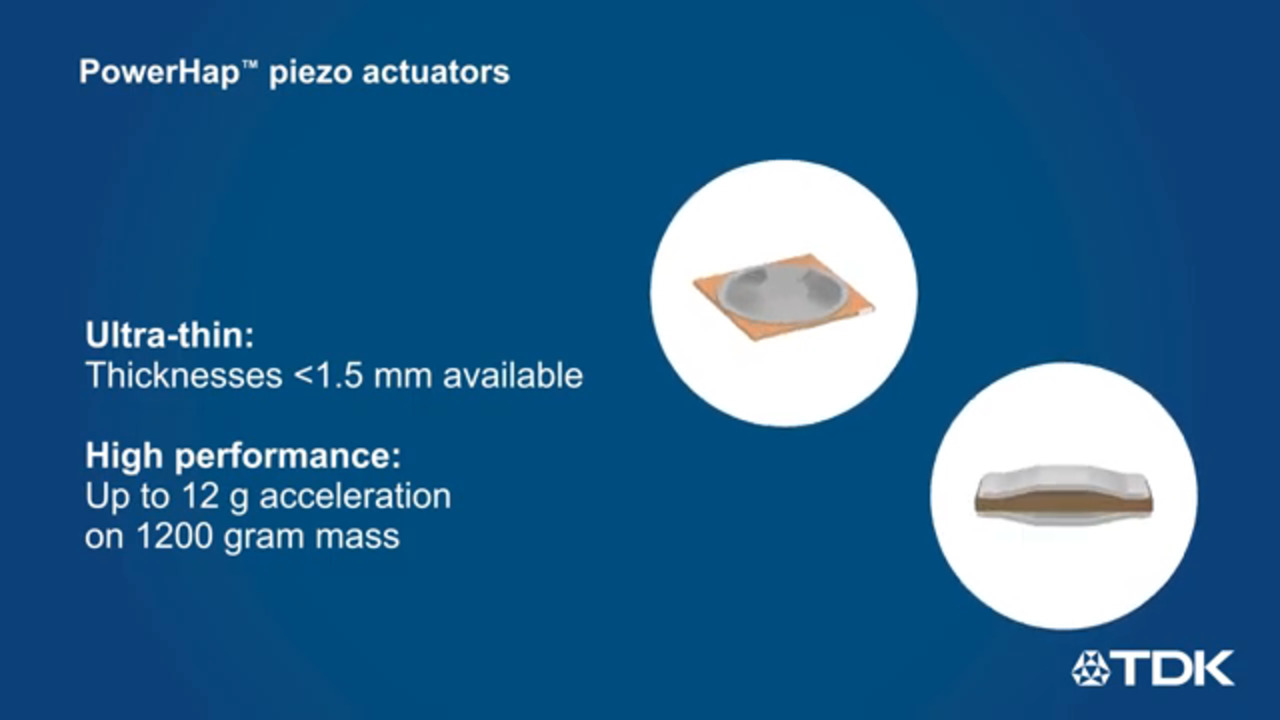
I prodotti introdotti di recente per attuatori piezoelettrici e per driver efficienti e dedicati hanno reso le tecnologie una soluzione largamente migliorata per i prodotti alimentati a batteria. Ad esempio, i recenti prodotti aptici piezoelettrici introdotti da TDK come PowerHap B54102H1020A001 (12,7 mm2 di superficie) e B54101H1020A001 (26 mm 2) hanno un'altezza inferiore a 2,5 mm e utilizzano una struttura multistrato e non monostrato come i dispositivi basati sulla tecnologia per amplificatori audio. Questa struttura multistrato allevia un poco la domanda posta sul driver abbassando la tensione di comando (tra 60 e 120 V).
Ogni strato del prodotto multistrato di TDK si espande di poco in direzione "z" a causa dell'effetto piezoelettrico inverso. Tuttavia, poiché il dispositivo piezoelettrico deve mantenere un volume costante, gli strati si contraggono simultaneamente nelle dimensioni 'x' e 'y'.
Il prodotto di TDK amplifica meccanicamente questa contrazione utilizzando una coppia di piatti su ciascuna estremità del dispositivo piezoelettrico per aumentare il movimento sull'asse z di un fattore 15, ottenendo uno spostamento tra 35 e 65 micrometri, a seconda del modello (Figura 3). Sotto un carico di 100 grammi (funzionamento unipolare, onda sinusoidale a impulso singolo, 200 Hz) l'attuatore di TDK più grande raggiunge un'accelerazione di 30 g picco-picco dopo appena 1 millisecondo. Il campo di frequenza da 1 a 1000 Hz consente ai progettisti di sviluppare profili personalizzati di riscontro aptico ad alta definizione.
 Figura 3: Gli attuatori aptici piezoelettrici di TDK utilizzano una struttura multistrato e una coppia di piatti per amplificare il movimento sull'asse z. (Immagine per gentile concessione di TDK)
Figura 3: Gli attuatori aptici piezoelettrici di TDK utilizzano una struttura multistrato e una coppia di piatti per amplificare il movimento sull'asse z. (Immagine per gentile concessione di TDK)
Gli attuatori aptici piezoelettrici di TDK possono funzionare in modalità unipolare o bipolare. Il funzionamento unipolare applica una tensione positiva sull'attuatore, mentre il funzionamento bipolare varia la tensione tra i valori di picco positivo e negativo. Il funzionamento bipolare ha il vantaggio di realizzare uno spostamento maggiore a parità di tensione picco-picco; per contro si può ottenere lo stesso spostamento con una tensione picco-picco inferiore. Il rovescio della medaglia è che il funzionamento bipolare aumenta i carichi meccanici ed elettrici sull'attuatore (Figura 4).
 offers the same mechanical displacement as unipolar") Figura 4: Il funzionamento bipolare (a destra) offre lo stesso spostamento meccanico del funzionamento unipolare ma utilizza una tensione picco-picco inferiore. (Immagine per gentile concessione di TDK)
Figura 4: Il funzionamento bipolare (a destra) offre lo stesso spostamento meccanico del funzionamento unipolare ma utilizza una tensione picco-picco inferiore. (Immagine per gentile concessione di TDK)
I fornitori di silicio di recente hanno anche proposto chip per driver progettati appositamente per applicazioni di riscontro aptico. Questi progetti possono produrre svariate modalità di vibrazione su un buon campo di frequenza e offrono caratteristiche di pilotaggio unipolare o bipolare pur funzionando con un'efficienza molto maggiore rispetto ai progetti precedenti. Alcuni esempi includono il driver aptico piezoelettrico BOS1901CQT di Boréas Technologies e il driver di potenza per motori DRV2667 di Texas Instruments.
Il CI di Boréas Technologies è un driver attuatore piezoelettrico a chip singolo che incorpora la tecnologia di recupero di energia ed è in grado di generare molteplici segnali di vibrazione. Il chip può pilotare attuatori fino a 190 Vpicco-picco da un'alimentazione tra 3 e 5,5 V. BOS1901 utilizza un'interfaccia periferica seriale (SPI) ad alta velocità e tutte le impostazioni sono regolabili attraverso il front-end digitale. Il tempo di avvio tipico inferiore a 300 microsecondi si traduce in una bassa latenza.
Il chip di TI è un driver aptico piezoelettrico con un interruttore boost da 105 V e un front-end digitale in grado di pilotare attuatori ad alta e a bassa tensione. Il front-end digitale allevia il microprocessore dalla generazione della modulazione della larghezza di impulso (PWM) o dagli ulteriori requisiti di un canale analogico nel sistema host. Il chip include una memoria dedicata per archiviare e richiamare le forme d'onda, così come un avanzato sintetizzatore di forme d'onda. Il tempo di avvio tipico di 2 ms limita la latenza e la protezione contro i sovraccarichi termici evita di danneggiare il dispositivo qualora sia sovrapilotato.
Progettazione di un sistema aptico piezoelettrico
Entrambi i chip proposti da Boréas e da TI sono progettati per l'uso in un sistema tattile che include già un processore per applicazioni. Il processore avvia l'esecuzione del riscontro aptico tramite un SPI. In alternativa, il progettista può utilizzare un ingresso analogico per attivare gli effetti aptici (Figura 5).
 Figura 5: Circuito applicativo con il driver di potenza per motori DRV2667 di TI. Gli eventi aptici sono attivati dal processore per applicazioni touchscreen con il chip di TI che comanda il dispositivo aptico piezoelettrico. (Immagine per gentile concessione di Texas Instruments)
Figura 5: Circuito applicativo con il driver di potenza per motori DRV2667 di TI. Gli eventi aptici sono attivati dal processore per applicazioni touchscreen con il chip di TI che comanda il dispositivo aptico piezoelettrico. (Immagine per gentile concessione di Texas Instruments)
Grazie al livello di integrazione dei driver più recenti, la progettazione di sistemi touchscreen con riscontro aptico piezoelettrico si è semplificata ma la scelta di alcuni componenti è importante per ottimizzare le prestazioni. Ad esempio, la tensione di boost (BST) dovrebbe essere di 5 V superiore alla tensione di picco che sarà applicata all'attuatore piezoelettrico. Ciò offre un certo livello di sovraccarico all'amplificatore, impostato utilizzando la rete del divisore resistivo R1/R2 mostrata nella Figura 5.
La formula per calcolare i valori del resistore è: V(BST) = V(FB) x (1 + R1/R2), dove V(FB) = 1,32 V.
Quindi, ad esempio, per ottenere la V(BST) massima di 105 V del driver di TI, i valori R1 e R2 dovrebbero essere rispettivamente di 768 kΩ e 9,76 kΩ.
La corrente di boost di picco viene assorbita dall'alimentazione tramite l'induttore L1. Questa corrente è determinata da R(EXT) ma bisogna fare attenzione a selezionare un induttore capace di far fronte al limite di corrente programmato (ILIM). La relazione tra R(EXT) e ILIM è stabilita dalla formula:
![]()
Dove K = 10.500, VREF = 1,35 V, RINT (resistenza interna del driver) = 60 Ω e ILIM = limite di corrente di picco di L1.
La scelta dell'induttore è importante per assicurare le migliori prestazioni del driver. Nel caso del chip di TI, le induttanze consigliate vanno da 3,3 a 22 μH. Il compromesso sta nello scegliere un'induttanza maggiore per ridurre le perdite di commutazione del convertitore boost o un'induttanza minore per massimizzare la sua corrente di uscita.
Le specifiche elettriche fondamentali per l'attuatore aptico piezoelettrico dal punto di vista del driver sono la tensione nominale e la capacità elettrica. Ad esempio, alla massima frequenza di 500 Hz del driver di TI, il dispositivo è ottimizzato per pilotare fino a 50 nF a 200 Vpicco-picco (la massima capacità di swing di tensione del driver). Il chip può pilotare capacità elettriche maggiori se si riduce la tensione di boost programmata e/o se l'utente limita il campo di frequenza di ingresso, ad esempio, a 300 Hz.
Un'altra importante scelta tra i componenti è il condensatore boost (C(BST)). Il condensatore deve avere una tensione nominale almeno pari alla tensione di boost, meglio se superiore. Ad esempio, si consiglia un condensatore di tipo X5R o X7R da 250 V e 100 nF quando si utilizza la tensione di boost massima di 105 V del chip di TI. C(BST) deve avere una capacità elettrica di lavoro minima di almeno 50 nF. Per V(BST) da 30 a 80 V, è accettabile un condensatore da 100 V e 100 nF e per V(BST) inferiore a 30 V, si consiglia un condensatore da 50 V e 0,22 μF.
Si consiglia l'uso di un condensatore a effetto di massa (CBULK) accanto all'induttore per via dei requisiti di corrente del pin dell'interruttore. Si consiglia un condensatore ceramico di tipo X5R o X7R con capacità elettrica di almeno 1 μF.
Strumenti di sviluppo
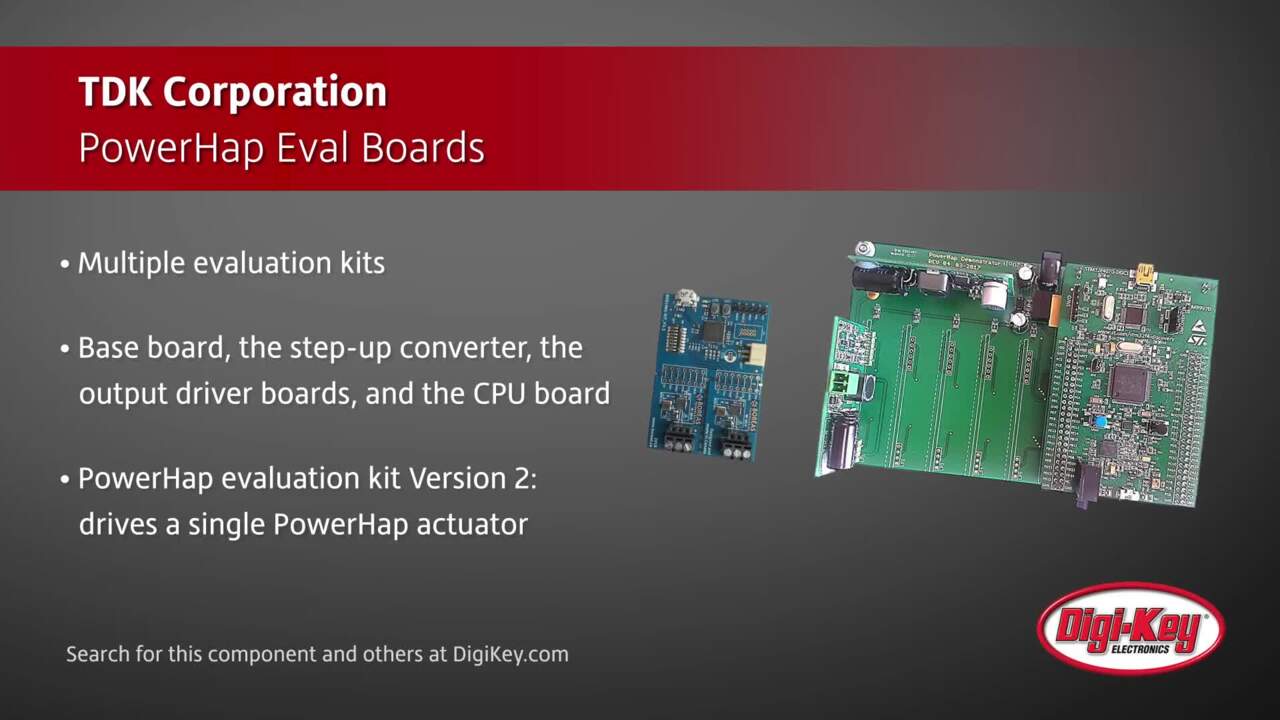
Per gli ingegneri interessati a sperimentare le capacità degli attuatori aptici piezoelettrici di TDK prima di scegliere l'hardware, l'azienda offre il kit di valutazione a canale singolo PowerHap Z63000Z2910Z 1Z 1. Il kit comprende una scheda base, un convertitore step-up, una scheda per driver di uscita e una scheda per microcontroller.
Il kit è fornito con software di configurazione per PC Windows 7 (o successivo). Una volta caricato il software, il kit viene collegato al PC tramite un cavo USB e alimentato a 12 V c.c. Il software fornisce quindi un'interfaccia per configurare la risposta aptica quando si preme l'attuatore. L'interfaccia consente di configurare i seguenti parametri di segnale (Figura 6):
- Ampiezza: 5 ~ 100% (115 V)
- Frequenza: 20 ~ 300 Hz
- Forma d'onda (trapezoidale, onda quadra sinusoidale, dente di sega)
- Ciclo di lavoro trapezoidale: 35 ~ 75%
- Numero di impulsi: 1 ~ 1000
- Livello di trigger: 0 ~ 12 V (più basso è il livello, più l'attuatore deve essere premuto per attivare il segnale)
- Tempo di ritardo (durante il quale l'attuatore non rileva alcuna forza)
 Figura 6: Il software del kit di valutazione PowerHap di TDK offre l'interfaccia per la configurazione del segnale. Una volta impostata, la configurazione può essere inviata al processore della scheda di valutazione tramite un apposito pulsante. (Immagine per gentile concessione di TDK)
Figura 6: Il software del kit di valutazione PowerHap di TDK offre l'interfaccia per la configurazione del segnale. Una volta impostata, la configurazione può essere inviata al processore della scheda di valutazione tramite un apposito pulsante. (Immagine per gentile concessione di TDK)
Il software consente inoltre di creare forme d'onda personalizzate. Dopo aver configurato il software, le informazioni vengono inviate al processore del kit tramite il cavo USB.
Un secondo kit di valutazione, PowerHap Z63000Z2910Z1Z44, è stato progettato specificamente per gli sviluppatori che usano il driver aptico piezoelettrico BOS1901CQT di Boréas. Questo kit include una scheda base, un convertitore step-up, due driver e un microcontroller. Il kit di base è fornito con un attuatore aptico piezoelettrico di TDK (Figura 7).
 Figura 7: Il kit di valutazione PowerHap Z63000Z2910Z1Z44 di TDK utilizza driver aptici piezoelettrici di Boréas ed è conforme al protocollo audio USB per semplificare la configurazione. (Immagine per gentile concessione di TDK)
Figura 7: Il kit di valutazione PowerHap Z63000Z2910Z1Z44 di TDK utilizza driver aptici piezoelettrici di Boréas ed è conforme al protocollo audio USB per semplificare la configurazione. (Immagine per gentile concessione di TDK)
La scheda è collegata a un PC tramite un cavo USB, utilizza il protocollo audio USB standard e si presenta sul computer come una normale uscita audio. La prototipazione delle forme d'onda (fino a 190 Vpicco-picco) e la loro riproduzione è possibile utilizzando il protocollo audio USB per testare gli effetti aptici in applicativi software come MATLAB, Python e Audacity.
Conclusione
Il riscontro aptico con attuatori piezoelettrici, ERM e LRA ha migliorato il controllo dei touchscreen in applicazioni di tipo consumer e industriale. Tuttavia, i progressi fatti con gli attuatori aptici piezoelettrici di formato compatto e a tensione inferiore hanno esteso i vantaggi del riscontro aptico ad alta definizione anche ai dispositivi alimentati a batteria.
Al tempo stesso, la progettazione di sistemi aptici piezoelettrici è stata semplificata grazie all'introduzione di driver dedicati che si interfacciano con i più diffusi processori applicativi e offrono il supporto per un'ampia gamma di forme d'onda. La disponibilità di kit di valutazione da parte di fornitori come TDK per questi dispositivi consente di sperimentare e prototipare prima di scegliere la piattaforma hardware.
Esonero della responsabilità: le opinioni, le convinzioni e i punti di vista espressi dai vari autori e/o dai partecipanti al forum su questo sito Web non riflettono necessariamente le opinioni, le convinzioni e i punti di vista di DigiKey o le sue politiche.