Scelta della tecnologia per i sensori di prossimità e distanza
Contributo di Editori nordamericani di DigiKey
2024-09-18
L'uso di sensori di prossimità e distanza per rilevare la presenza e la posizione di oggetti senza contatto fisico può essere un aspetto importante nel controllo di processi industriali come la movimentazione dei materiali, i macchinari agricoli, le operazioni di fabbricazione e assemblaggio e il confezionamento di alimenti, bevande e prodotti farmaceutici.
Questi sensori sono disponibili in diverse tecnologie, tra cui fotoelettrica, laser, induttiva, capacitiva, magnetica e a ultrasuoni. Per determinare l'opzione migliore per una determinata applicazione, occorre considerare fattori quali la portata, le dimensioni, l'accuratezza, la sensibilità, la risoluzione e il costo.
Un fattore chiave in molte applicazioni è il materiale dell'oggetto da rilevare. Alcuni sensori si comportano in modo diverso con le superfici dure rispetto a quelle fibrose, mentre altri sensori possono essere influenzati dal colore o dalla riflettanza dell'oggetto.
Questo articolo passa in rassegna le tecnologie alla base dei sensori di prossimità senza contatto comunemente disponibili, esaminando il loro funzionamento, le prestazioni di base e alcuni modelli esemplari di SICK, insieme ad alcune applicazioni previste.
Sensori fotoelettrici
I sensori fotoelettrici, come i sensori di prossimità fotoelettrici W10 di SICK, sono semplici da usare e da installare e sono disponibili con una serie di funzioni adatte a numerose applicazioni. Il design robusto dei sensori W10 li rende adatti al rilevamento preciso di oggetti in ambienti difficili. Il touchscreen integrato velocizza l'impostazione dei parametri e l'impiego dei sensori (Figura 1).
 Figura 1: Il touchscreen di questi sensori fotoelettrici può accelerare la messa in funzione e l'implementazione. (Immagine per gentile concessione di SICK)
Figura 1: Il touchscreen di questi sensori fotoelettrici può accelerare la messa in funzione e l'implementazione. (Immagine per gentile concessione di SICK)
Le funzioni di autoapprendimento disponibili consentono ai progettisti di adattare questi sensori a requisiti applicativi specifici. Inoltre, grazie a funzioni integrate come le impostazioni di velocità, le modalità di misurazione standard e di precisione e la soppressione del primo piano e dello sfondo, un unico sensore può essere utilizzato in una vasta gamma di applicazioni. La serie di sensori comprende quattro varianti, che si differenziano per le distanze operative e le opzioni di montaggio.
Soppressione dello sfondo
I sensori di prossimità fotoelettrici con soppressione dello sfondo (BGS) utilizzano la triangolazione tra l'elemento emittente e quello ricevente. I segnali provenienti da oggetti che si trovano oltre il campo di rilevamento impostato vengono soppressi. Inoltre, la tecnologia BGS di SICK ignora gli oggetti altamente riflettenti sullo sfondo e può gestire condizioni di illuminazione ambientale difficili.
La soppressione dello sfondo è particolarmente utile quando l'oggetto bersaglio e lo sfondo (come un nastro trasportatore) hanno una riflettanza simile o se la riflettanza dello sfondo è variabile e può causare interferenze con il rilevamento.
Soppressione del primo piano
I sensori di prossimità fotoelettrici con soppressione del primo piano (FGS) possono rilevare oggetti a una distanza definita. Rilevano tutti gli oggetti tra il sensore e la distanza di rilevamento (impostata sullo sfondo). Per garantire un rilevamento affidabile, lo sfondo deve essere relativamente luminoso e non deve variare in altezza.
Quando gli oggetti si trovano su una superficie riflettente, come un nastro trasportatore bianco o chiaro, la soppressione del primo piano può migliorare il rilevamento. Anziché rilevare la luce riflessa dall'oggetto, il sensore rileva l'oggetto in base all'assenza di luce riflessa dal nastro trasportatore.
Retroriflettente
In un sensore retroriflettente, la luce emessa colpisce un riflettore e la luce riflessa viene valutata dal sensore. Gli errori possono essere ridotti al minimo utilizzando filtri polarizzanti. I film estensibili e gli involucri di plastica trasparenti possono interferire con questi sensori. Ridurre la sensibilità del sensore può aiutare a superare queste sfide. Inoltre, la sostituzione degli emettitori di luce IR standard con i laser può portare a campi di rilevamento più lunghi e una risoluzione più elevata.
Le prestazioni di un sensore retroriflettente possono essere migliorate utilizzando un'isteresi di commutazione inferiore al normale. In questi progetti è possibile rilevare in modo affidabile anche una minima attenuazione della luce tra il sensore e il riflettore, causata ad esempio dalle bottiglie di vetro. SICK offre anche un sistema di monitoraggio chiamato AutoAdapt che regola e adatta continuamente la soglia di commutazione in risposta al graduale accumulo di contaminanti che potrebbe portare al guasto del sistema di rilevamento.
A sbarramento
A differenza dei sensori retroriflettenti, i sensori a sbarramento utilizzano due dispositivi attivi: un trasmettitore e un ricevitore. Il rilevamento a sbarramento consente di ottenere campi di rilevamento più ampi. La sostituzione degli emettitori IR con diodi laser può migliorare ulteriormente la distanza di rilevamento, mantenendo un'alta risoluzione e un rilevamento preciso.
Fibra ottica
I sensori a fibra ottica sono una variante dei modelli a sbarramento. In un sensore fotoelettrico a fibra ottica, il trasmettitore e il ricevitore condividono lo stesso alloggiamento. L'emittente e il ricevente utilizzano cavi in fibra ottica separati. Questi sensori sono particolarmente adatti all'uso in applicazioni ad alta temperatura e in ambienti pericolosi e difficili.
Array di sensori fotoelettrici
La famiglia di sensori fotoelettrici RAY26 Reflex Array, come il modello 1221950, offre un rilevamento affidabile di oggetti piatti e una rapida messa in funzione. Se combinati con un riflettore, i sensori fotoelettrici rilevano anche oggetti piccoli, piatti, trasparenti o irregolari di soli 3 mm. All'interno di un campo luminoso uniforme alto 55 mm, i sensori rilevano il bordo anteriore dell'oggetto. Ciò significa che anche gli oggetti perforati possono essere rilevati in modo affidabile senza una complessa commutazione (Figura 4).
 Figura 2: Gli array di sensori fotoelettrici possono rilevare oggetti di soli 3 mm in un campo di 55 mm di altezza. (Immagine per gentile concessione di SICK)
Figura 2: Gli array di sensori fotoelettrici possono rilevare oggetti di soli 3 mm in un campo di 55 mm di altezza. (Immagine per gentile concessione di SICK)
Sensori di distanza laser
I progettisti di applicazioni come il monitoraggio del livello nei contenitori, il rilevamento della posizione degli oggetti sui nastri trasportatori, la posizione XY dell'asse nei sistemi di carrelli elevatori automatizzati, il posizionamento verticale delle gru nei magazzini e dei trasportatori aerei e il monitoraggio del diametro durante l'avvolgimento delle bobine possono rivolgersi ai sensori di distanza laser DT50. Questi sensori supportano misurazioni della distanza a tempo di volo (ToF) fino a diversi metri utilizzando la luce laser riflessa per garantire l'immunità all'illuminazione ambientale e un funzionamento preciso e affidabile.
Ad esempio, il modello DT50-2B215252 ha un raggio da 200 a 30.000 mm e diverse caratteristiche speciali, tra cui:
- Alloggiamento robusto con grado di protezione IP65 e IP67
- Può fornire fino a 3.000 misurazioni di distanza al secondo
- Tempo di risposta minimo di 0,83 ms
- L'alloggiamento compatto supporta molte applicazioni, dai robot industriali alla misurazione dell'altezza di riempimento dei contenitori
Misurazioni ad alta risoluzione con l'ausilio di statistiche
La misurazione della distanza ad alta definizione plus (HDDM+) è una tecnologia di misurazione ToF ad alta risoluzione che può essere utilizzata nei sensori laser di rilevamento e telemetria tramite onde luminose (LiDAR). A differenza delle tecnologie di rilevamento a singolo impulso o a correlazione di fase, HDDM+ è un processo di misurazione statistico.
Il software del sensore valuta statisticamente gli echi di più impulsi laser per filtrare le interferenze provenienti da fonti come vetri, nebbia, pioggia, polvere, neve, foglie, recinzioni e altri oggetti per calcolare la distanza dal bersaglio previsto. La misurazione di distanza risultante può avere un elevato livello di certezza anche in condizioni ambientali difficili (Figura 5).
 Figura 3: Il software HDDM+ di SICK utilizza un processo di valutazione statistica per eliminare il "rumore" di elementi come vetri, nebbia, pioggia, polvere, neve, foglie e recinzioni. (Immagine per gentile concessione di SICK)
Figura 3: Il software HDDM+ di SICK utilizza un processo di valutazione statistica per eliminare il "rumore" di elementi come vetri, nebbia, pioggia, polvere, neve, foglie e recinzioni. (Immagine per gentile concessione di SICK)
Le applicazioni tipiche della tecnologia HDDM+ comprendono la misurazione di distanza per il controllo di qualità nella produzione elettronica, il rilevamento multidimensionale di oggetti LiDAR e la determinazione della posizione nell'ingegneria meccanica e impiantistica, nonché la determinazione della posizione di gru o veicoli industriali.
Il campo di rilevamento dei sensori HDDM+ arriva fino a 1,5 km su nastro retroriflettente. Ad esempio, il modello DT1000-S11101 ha un raggio fino a 460 m con una precisione di misurazione tipica di ±15 mm per gli oggetti naturali e una risoluzione regolabile da 0,001 a 100 mm.
Induttivo
I sensori di prossimità induttivi come la serie IME di SICK possono rilevare oggetti metallici ferrosi e non ferrosi. Questi sensori sono costituiti da un circuito risonante induttore-condensatore (LC) che genera un campo elettromagnetico alternato ad alta frequenza. Il campo viene smorzato quando un oggetto metallico entra nel campo di rilevamento. Lo smorzamento viene rilevato dal circuito di valutazione del segnale e da un amplificatore che produce il segnale di uscita (Figura 4).
 Figura 4: Un sensore di prossimità induttivo di base è costituito da un circuito LC che produce un campo alternato, un circuito di valutazione del segnale e un amplificatore. (Immagine per gentile concessione di SICK)
Figura 4: Un sensore di prossimità induttivo di base è costituito da un circuito LC che produce un campo alternato, un circuito di valutazione del segnale e un amplificatore. (Immagine per gentile concessione di SICK)
Due importanti specifiche per la distanza di rilevamento di diverse tecnologie di sensori di prossimità sono la distanza di rilevamento nominale (Sn) e la distanza di rilevamento protetta (Sa). La Sn non considera le tolleranze di fabbricazione o le influenze esterne come la temperatura di funzionamento. La Sa tiene conto sia delle tolleranze di fabbricazione sia delle variazioni nelle condizioni operative. La Sa è in genere circa l'81% del valore della Sn. Ad esempio, per il sensore induttivo modello IME08-02BPSZT0S, la Sn è 2 mm e la Sa è 1,62 mm.
Rilevamento capacitivo
Come i sensori induttivi, i sensori di prossimità capacitivi utilizzano un oscillatore. In questo caso, si utilizza un condensatore aperto in cui l'elettrodo attivo del sensore produce un campo elettrostatico rispetto alla massa. Questi sensori possono rilevare la presenza di svariati materiali, tra cui oggetti metallici e non metallici.
Quando un oggetto entra nel campo elettrostatico, l'ampiezza delle oscillazioni nel circuito risonante cambia in base alle proprietà dielettriche del materiale. Il circuito di valutazione del segnale rileva la variazione e un amplificatore produce il segnale di uscita (Figura 5).
 Figura 5: In un sensore di prossimità capacitivo, un circuito oscillante produce un campo elettrostatico che cambia caratteristiche quando il bersaglio da rilevare entra nel campo. (Immagine per gentile concessione di SICK)
Figura 5: In un sensore di prossimità capacitivo, un circuito oscillante produce un campo elettrostatico che cambia caratteristiche quando il bersaglio da rilevare entra nel campo. (Immagine per gentile concessione di SICK)
Come per i sensori di prossimità induttivi, esistono diverse specifiche relative alla distanza di rilevamento dei sensori di prossimità capacitivi, tra cui Sn, Sa e un fattore di riduzione. Ad esempio, il modello CM12-08EBP-KC1 ha una Sn di 8 mm e una Sa nominale di 5,76 mm.
L'oggetto da rilevare deve essere grande almeno quanto la superficie del sensore e la distanza di rilevamento varia con il fattore di riduzione del materiale. I fattori di riduzione sono legati alla costante dielettrica del materiale e possono variare da 1 per i metalli e l'acqua a 0,4 per il polivinilcloruro (PVC), 0,6 per il vetro e 0,5 per la ceramica.
Magnetico
I sensori di prossimità magnetici rispondono alla presenza di un magnete. I sensori di prossimità magnetici di SICK utilizzano due tecnologie di rilevamento:
- I sensori magnetoresistivi giganti (GMR) si basano su resistori che cambiano di valore in presenza di un campo magnetico. Un ponte di Wheatstone rileva la variazione di resistenza e produce un segnale di uscita. I sensori MZT7, come il modello MZT7-03VPS-KP0 progettato per l'uso con cilindri con cave a T, utilizzano la tecnologia GMR per rilevare il posizionamento del pistone negli azionamenti pneumatici e in applicazioni simili.
- La tecnologia LC utilizza un circuito risonante che risuona con una piccola ampiezza. Se si avvicina un campo magnetico esterno, l'ampiezza di risonanza aumenta. L'aumento viene rilevato da un circuito di valutazione del segnale e un amplificatore produce il segnale di uscita (Figura 6). MM08-60APO-ZUA ha una Sn di 60 mm e una Sa di 48,6 mm.
 Figura 6: In un sensore di prossimità magnetica, la sonda di campo può utilizzare la tecnologia GMR o LC. (Immagine per gentile concessione di SICK)
Figura 6: In un sensore di prossimità magnetica, la sonda di campo può utilizzare la tecnologia GMR o LC. (Immagine per gentile concessione di SICK)
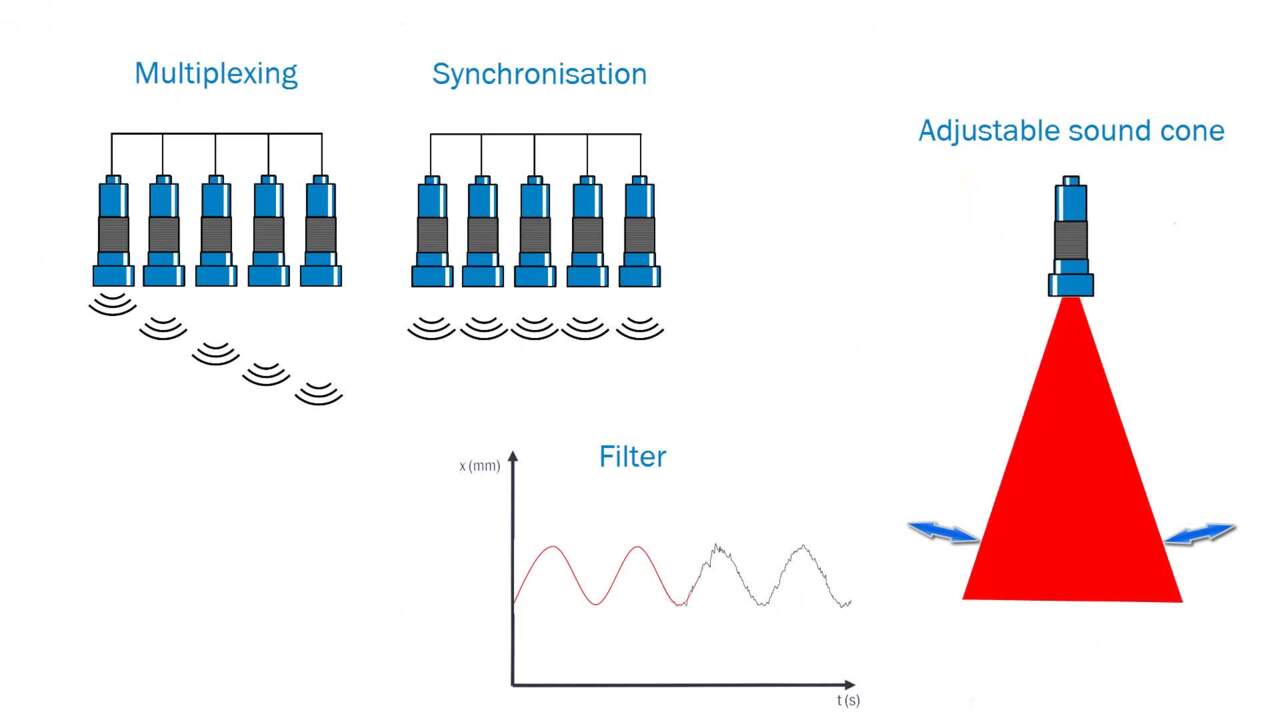
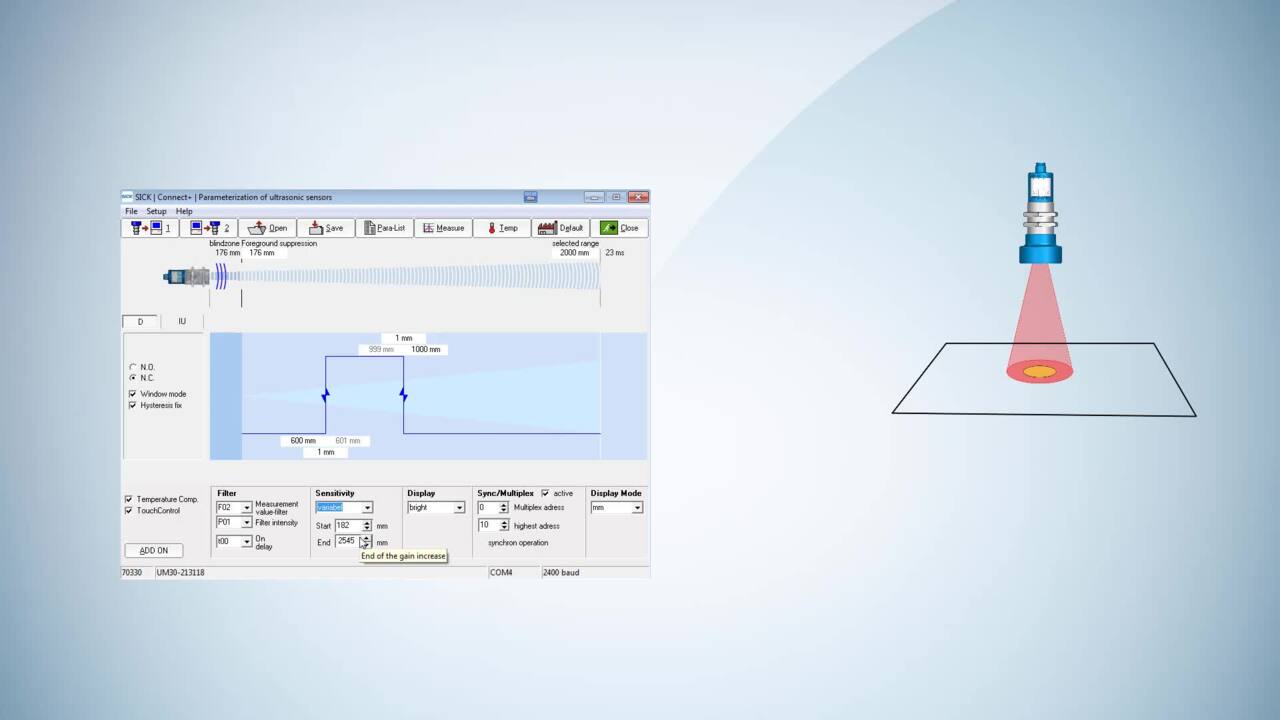
Sensori a ultrasuoni
Per oggetti distanti fino a 8 metri, i progettisti possono rivolgersi a sensori a ultrasuoni come la famiglia UM30 di SICK. Questi sensori sono dotati di compensazione della temperatura integrata per migliorare l'accuratezza della misurazione e garantiscono il rilevamento di oggetti indipendentemente dal colore, immunità alla polvere e funzionamento fino a +70 °C. Misurano le distanze in base alla tecnologia del tempo di volo, in cui la distanza è uguale alla velocità del suono moltiplicata per il tempo di volo acustico totale (t2) con il totale diviso per 2 (Figura 6).
 Figura 7: I sensori a ultrasuoni possono misurare la distanza in base al tempo di volo totale (t2) delle onde sonore. (Immagine per gentile concessione di SICK)
Figura 7: I sensori a ultrasuoni possono misurare la distanza in base al tempo di volo totale (t2) delle onde sonore. (Immagine per gentile concessione di SICK)
I sensori a ultrasuoni, come il modello UM30-212111, sono adatti ad applicazioni come il monitoraggio di cassette vuote. Un monitor interno della temperatura produce una precisione di misurazione di ±1%. Questi sensori indipendenti dal colore sono in grado di rilevare oggetti difficili da distinguere anche in presenza di sporcizia e polvere.
Conclusione
La buona notizia è che esiste un'ampia gamma di sensori di prossimità e distanza. Ciò significa che esiste una soluzione per ogni esigenza applicativa. La sfida consiste nell'individuare la soluzione ottimale per il rilevamento di materiali specifici in condizioni operative e applicative reali.
Esonero della responsabilità: le opinioni, le convinzioni e i punti di vista espressi dai vari autori e/o dai partecipanti al forum su questo sito Web non riflettono necessariamente le opinioni, le convinzioni e i punti di vista di DigiKey o le sue politiche.