Usare piattaforme abilitate per Bluetooth 5.1 per la precisione della tracciabilità delle risorse e della localizzazione indoor - Parte 1
Contributo di Editori nordamericani di DigiKey
2019-07-25
Nota del redattore: La Parte 1 di questo articolo descrive le capacità di Bluetooth 5.1 Direction Finding, un'aggiunta al firmware di Bluetooth Low Energy che consente ai progettisti di sviluppare applicazioni di localizzazione basate sull'angolo di arrivo (AoA) e sull'angolo di partenza (AoD), ad esempio i sistemi di localizzazione indoor (IPS) e la tracciabilità delle risorse. Saranno quindi presentate le piattaforme idonee su cui eseguire le nuove funzionalità. La Parte 2 illustra come sviluppare applicazioni basate su Bluetooth 5.1 Direction Finding e descrive come utilizzare queste piattaforme.
Le società di logistica cercano di migliorare l'efficienza della supply chain monitorando le risorse in tempo reale, mentre le aziende puntano a migliorare la produttività monitorando i movimenti del personale e dei clienti. Di conseguenza cresce la domanda di servizi di localizzazione. Sebbene l'indicatore dell'intensità del segnale ricevuto (RSSI) di Bluetooth possa essere utilizzato per stimare la distanza da un punto fisso noto, spesso questa tecnica non è abbastanza precisa per applicazioni come un sistema di localizzazione indoor (IPS) e la tracciabilità delle risorse. Un aggiornamento della specifica Bluetooth offre però un percorso più preciso per muoversi in questa direzione.
Nello specifico, l'ultima versione della Bluetooth Core Specification (v5.1) (commercializzata come "Bluetooth 5.1 Direction Finding") ha aggiunto le funzioni di radiogoniometria Angolo di arrivo (AoA) e Angolo di partenza (AoD) che agevolano di molto agli sviluppatori il compito di determinare con precisione la posizione di un trasmettitore Bluetooth in due o tre dimensioni.
Questa prima parte descrive le tecniche AoA e AoD e spiega come, grazie ai miglioramenti apportati alla Bluetooth Core Specification, la loro implementazione sia stata semplificata. Presenta quindi le piattaforme su cui implementare le applicazioni di Direction Finding.
Tecniche di radiogoniometria RF
La radiogoniometria della radiofrequenza (RF) basata su RSSI fornisce la distanza approssimata in base all'intensità del segnale. Effettuando più misurazioni della distanza da punti diversi si può ottenere una maggiore precisione. L'RSSI ha il grande vantaggio di richiedere una sola antenna per dispositivo, eliminando la complessità, i costi e le dimensioni degli array di antenne. Lo svantaggio è una mancanza di precisione, che con questa tecnica è limitata a 3-5 metri.
Una seconda tecnica comune di radiogoniometria è nota come Tempo di arrivo (ToA), ovvero il tempo che un segnale radio impiega per arrivare da un singolo trasmettitore a un singolo ricevitore remoto. Anche questo metodo si avvale di una sola antenna per dispositivo, ma richiede che ogni dispositivo abbia un clock sincronizzato estremamente preciso, e questo è il rovescio della medaglia. La precisione della posizione per i sistemi ToA può avvicinarsi a 1 m.
Con il rilascio della specifica Bluetooth 5.1, il Bluetooth Special Interest Group (SIG) ha scelto di supportare una terza tecnica di radiogoniometria basata su AoA e AoD.
Con AoA, un dispositivo ricevente traccia gli angoli di arrivo per i singoli oggetti, mentre con AoD calcola la propria posizione nello spazio usando gli angoli di più beacon e le loro posizioni (Figura 1).
 and AoD method (right)") Figura 1: Nel metodo di radiogoniometria AoA (a sinistra), le risorse trasmettono (TX) la propria posizione a un localizzatore AoA che misura l'angolo di arrivo del segnale. Con il metodo AoD (a destra), i beacon trasmettono informazioni AoD mentre un dispositivo mobile riceve (RX) i segnali dei beacon e calcola la posizione. In ogni caso, è il dispositivo ricevente ad aver bisogno della potenza computazionale per calcolare la direzione del trasmettitore. (Immagine per gentile concessione di Silicon Labs)
Figura 1: Nel metodo di radiogoniometria AoA (a sinistra), le risorse trasmettono (TX) la propria posizione a un localizzatore AoA che misura l'angolo di arrivo del segnale. Con il metodo AoD (a destra), i beacon trasmettono informazioni AoD mentre un dispositivo mobile riceve (RX) i segnali dei beacon e calcola la posizione. In ogni caso, è il dispositivo ricevente ad aver bisogno della potenza computazionale per calcolare la direzione del trasmettitore. (Immagine per gentile concessione di Silicon Labs)
La decisione di includere una funzione di radiogoniometria in Bluetooth 5.1 è fondata, in parte, sul fatto che esistono già alcune aziende che offrono soluzioni AoA e AoD proprietarie per prodotti Bluetooth Low Energy (BLE). Bluetooth 5.1 permette agli sviluppatori di sfruttare più facilmente la radiogoniometria RF grazie all'aggiornamento alle Core Specification mirato a semplificare l'estrazione dei dati del segnale "IQ" (informazioni in fase e in quadratura) dai pacchetti BLE. In questo modo, è per loro più semplice implementare le applicazioni comprendenti servizi di localizzazione.
Ad esempio, il metodo AoA è idoneo per tracciare un transceiver BLE che sta trasmettendo. Utilizzando una singola antenna, il transceiver invia pacchetti abilitati alla radiogoniometria che vengono ricevuti da un "localizzatore" a più antenne. Il localizzatore campiona i dati IQ dai pacchetti di segnali mentre passa da tutte le antenne attive dell'array. Questo gli permette di rilevare la differenza di fase del segnale dovuta alla differenza della distanza da ogni antenna dell'array alla singola antenna trasmittente. Il motore di localizzazione utilizza quindi le informazioni sulla differenza di fase per determinare l'angolo da cui sono stati ricevuti i segnali e quindi la direzione del trasmettitore (Figura 2).
 Figura 2: L'angolo di arrivo di un segnale radio può essere calcolato se si conoscono la fase del segnale (θ) di ogni antenna, la lunghezza d'onda (λ) e la distanza (d) tra antenne adiacenti (Immagine per gentile concessione di Bluetooth SIG)
Figura 2: L'angolo di arrivo di un segnale radio può essere calcolato se si conoscono la fase del segnale (θ) di ogni antenna, la lunghezza d'onda (λ) e la distanza (d) tra antenne adiacenti (Immagine per gentile concessione di Bluetooth SIG)
La combinazione della direzione dei segnali calcolata da due o più localizzatori consente di individuare un trasmettitore (Figura 3).
 Figura 3: Calcolando l'AoA dei segnali in due localizzatori fissi, si può calcolare la posizione tridimensionale di una risorsa che sta trasmettendo. Se si conoscono le coordinate assolute dei localizzatori, è possibile calcolare anche le coordinate assolute della risorsa che trasmette. (Immagine per gentile concessione di Silicon Labs)
Figura 3: Calcolando l'AoA dei segnali in due localizzatori fissi, si può calcolare la posizione tridimensionale di una risorsa che sta trasmettendo. Se si conoscono le coordinate assolute dei localizzatori, è possibile calcolare anche le coordinate assolute della risorsa che trasmette. (Immagine per gentile concessione di Silicon Labs)
Nel caso del metodo AoD si ha la situazione inversa. In questo scenario, il dispositivo con l'array di antenne invia un segnale attraverso ognuna delle sue antenne. Quando ogni pacchetto di segnali delle antenne nell'array arriva alla singola antenna del ricevitore, a causa della diversa distanza percorsa a partire dal trasmettitore, risulta con una fase spostata rispetto al segnale precedente (Figura 4).
 Figura 4: Con il metodo AoD, quando ogni pacchetto di segnali delle antenne nell'array arriva alla singola antenna del ricevitore, a causa della diversa distanza percorsa a partire dal trasmettitore, risulta con una fase spostata rispetto al segnale precedente. (Immagine per gentile concessione di Bluetooth SIG)
Figura 4: Con il metodo AoD, quando ogni pacchetto di segnali delle antenne nell'array arriva alla singola antenna del ricevitore, a causa della diversa distanza percorsa a partire dal trasmettitore, risulta con una fase spostata rispetto al segnale precedente. (Immagine per gentile concessione di Bluetooth SIG)
L'antenna del dispositivo ricevente preleva campioni di IQ dai pacchetti di segnali e li inoltra al motore di posizionamento, che utilizza poi i dati per determinare l'angolo da cui sono stati ricevuti i segnali e quindi la direzione del trasmettitore. Questo sistema è idoneo per applicazioni come la navigazione indoor in cui il trasmettitore è un punto di riferimento fisso e il ricevitore è, ad esempio, lo smartphone di un consumatore.
Aggiornamenti a Bluetooth 5.1
Bluetooth 5.1 richiede delle modifiche al protocollo software RF (o "stack") e, a seconda del produttore del chip, dei miglioramenti hardware (radio). Per prima cosa, il protocollo rivisto aggiunge un'estensione di tono continuo (CTE) a qualsiasi pacchetto Bluetooth utilizzato per la radiogoniometria. (Per il resto, i pacchetti restano immutati, quindi possono essere utilizzati per la comunicazione BLE standard.)
Il CTE è un tono puro (cioè non modulato) inviato alla frequenza portante Bluetooth più 250 kHz (o talvolta più 500 kHz quando si utilizza la modalità di throughput più alta di BLE) per una durata tra 16 e 160 µs. Il tono è costituito da una sequenza "unwhitened" di "1" trasmessa abbastanza a lungo da consentire al ricevitore di estrarre i dati IQ senza gli effetti disruttivi della modulazione. Dato che il segnale CTE viene trasmesso per ultimo, il controllo a ridondanza ciclica (CRC) del pacchetto non viene influenzato.
La seconda aggiunta importante alla specifica semplifica di molto la configurazione del protocollo per eseguire il campionamento IQ. Questa configurazione comprende l'impostazione sia della temporizzazione del campione che della commutazione dell'antenna, due valori fondamentali per la precisione della stima della posizione.
Anche se si possono utilizzare varie configurazioni di temporizzazione del campionamento IQ, in genere un campione IQ viene registrato ogni 1 o 2 µs entro il periodo di riferimento per ciascuna antenna e i risultati vengono registrati nella memoria ad accesso casuale (RAM) del SoC BLE. Nella Figura 5 viene mostrato come la fase del segnale ricevuto varia mentre viene campionato da diverse antenne dell'array.[1]
 Figura 5: Un segnale proveniente da un unico trasmettitore mostra una fase diversa quando arriva alle antenne che si trovano a distanze diverse dalla sorgente. (Immagine per gentile concessione di Bluetooth SIG)
Figura 5: Un segnale proveniente da un unico trasmettitore mostra una fase diversa quando arriva alle antenne che si trovano a distanze diverse dalla sorgente. (Immagine per gentile concessione di Bluetooth SIG)
La registrazione dei campioni di IQ è solo il primo passo per realizzare un'applicazione comprendente un servizio di localizzazione. Per completare il compito, gli sviluppatori devono progettare o scegliere gli array di antenne ottimali per i localizzatori e i beacon utilizzati nell'applicazione e prendere dimestichezza con i complessi algoritmi necessari per eseguire i calcoli di radiogonometria.
Calcolo della direzione del segnale
Gli array di antenne per la radiogoniometria sono generalmente suddivisi in tre tipi: array lineare uniforme (ULA), array rettangolare uniforme (URA) e array circolare uniforme (UCA). Come suggeriscono i nomi, l'array lineare è monodimensionale, mentre quelli rettangolari e circolari sono bidimensionali. L'ULA è il più semplice da progettare e implementare, ma ha lo svantaggio di poter calcolare l'angolo di azimut solo presumendo che il dispositivo tracciato si muova costantemente sullo stesso piano. Se così non fosse, la precisione sarebbe compromessa. Gli URA e gli UCA possono misurare in modo affidabile sia gli angoli di azimut che quelli di elevazione (Figura 6).
 Figura 6: Le tecniche di radiogoniometria AoA e AoD richiedono array di antenne, le cui forme comuni sono quelle lineari, rettangolari e circolari. Ogni tipo di array può ottenere informazioni su elevazione e azimut, ma quelli rettangolari e circolari forniscono dati più affidabili sull'azimut. (Immagine per gentile concessione di Silicon Labs)
Figura 6: Le tecniche di radiogoniometria AoA e AoD richiedono array di antenne, le cui forme comuni sono quelle lineari, rettangolari e circolari. Ogni tipo di array può ottenere informazioni su elevazione e azimut, ma quelli rettangolari e circolari forniscono dati più affidabili sull'azimut. (Immagine per gentile concessione di Silicon Labs)
Progettare un array di antenne per la radiogoniometria non è un compito da poco. Ad esempio, quando le antenne sono posizionate in un array, si disturbano a vicenda la risposta a causa dell'accoppiamento reciproco. Per tenere conto di questi effetti, gli algoritmi di stima spesso richiedono delle risposte di array predefinite. Ad esempio, un algoritmo molto diffuso in commercio presuppone matematicamente che l'array sia formato da due subarray identici. Fortunatamente, per chi non è esperto di antenne, in commercio sono disponibili array di antenne con caratteristiche definite.
Un array di antenne efficace garantirà la raccolta di campioni di IQ accurati. I dati grezzi sono però insufficienti per determinare la direzione del segnale. Occorre elaborarli per tenere conto della ricezione multipercorso, dei ritardi di polarizzazione e propagazione del segnale, del rumore e del jitter.
Dato che la radiogoniometria RF non è un campo nuovo, esistono diverse tecniche matematiche affermate per stimare l'angolo di arrivo sulla base dei campioni di IQ ottenuti in applicazioni del mondo reale. La definizione del problema, ovvero la stima dell'angolo di arrivo (il calcolo per l'angolo di partenza è simile) di un segnale emesso (banda stretta) che arriva all'array ricevente, è semplice. I calcoli matematici richiesti per risolverlo lo sono meno.
Fondamentalmente, dato un set di dati di campioni di IQ per ogni antenna dell'array, gli algoritmi commerciali prima calcolano un vettore di dati "x" basato sulla seguente formula (e presumendo che i segnali siano sinusoidali (a banda stretta) sfasati e scalati):
![]() Equazione 1
Equazione 1
Dove "a" è un modello matematico dell'array di antenne (il "vettore di guida"),
"s" il segnale in arrivo e "n" è un termine di rumore.
X viene quindi utilizzato per generare la matrice di covarianza del campione di IQ "Rxx" usando la formula:
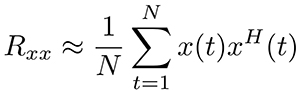 Equazione 2
Equazione 2
Questa matrice di covarianza del campione viene quindi utilizzata come ingresso per l'algoritmo dell'estimatore principale. Uno degli algoritmi più popolari e consolidati per la stima della frequenza e la radiogoniometria è la MUltiple SIgnal Classification (MUSIC). In termini tecnici, MUSIC utilizza la dissociazione degli autovettori e gli autovalori della matrice di covarianza per stimare l'AoA in base alle proprietà dei sottospazi di segnale e rumore.
La formula impiegata è:
![]() Equazione 3
Equazione 3
Dove "A" è una matrice diagonale contenente gli autovalori e "V" è una matrice contenente gli autovettori corrispondenti.
Una volta che V è isolato, può essere utilizzato in una formula che genera uno pseudo spettro con un picco che si verifica all'angolo di arrivo del segnale ricevuto (Equazione 4):
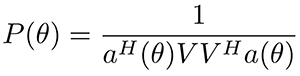 Equazione 4
Equazione 4
Lo spettro risultante assume la forma mostrata, con il picco che si verifica nella direzione da cui arriva il segnale trasmesso (Figura 7).[2]
 Figura 7: L'algoritmo MUSIC utilizza campioni di IQ per generare uno pseudo spettro di potenza, in cui il picco identifica la posizione del dispositivo trasmittente. Questo esempio mostra uno pseudo spettro 2D, in cui il dispositivo trasmittente si trova a un angolo di azimut di 50 gradi e a un angolo di elevazione di 45 gradi. (Immagine per gentile concessione di Silicon Labs)
Figura 7: L'algoritmo MUSIC utilizza campioni di IQ per generare uno pseudo spettro di potenza, in cui il picco identifica la posizione del dispositivo trasmittente. Questo esempio mostra uno pseudo spettro 2D, in cui il dispositivo trasmittente si trova a un angolo di azimut di 50 gradi e a un angolo di elevazione di 45 gradi. (Immagine per gentile concessione di Silicon Labs)
L'esecuzione degli algoritmi di radiogoniometria comporta molti calcoli e richiede molta memoria RAM e Flash.
Sono già disponibili prodotti commerciali Bluetooth 5.1 con le risorse appropriate. Ad esempio, Dialog Semiconductor offre il SoC DA14691 Bluetooth 5 LE per applicazioni di servizi di localizzazione. Il chip è basato su un microprocessore Arm® Cortex®-M33 e include 512 kB di RAM. Silicon Labs ha rilasciato uno stack Bluetooth 5.1 per il suo SoC EFR32BG13 BLE. Il chip usa un microprocessore Arm Cortex-M4 con 64 kB di RAM e 512 kB di Flash.
Nordic Semiconductor ha compiuto un ulteriore passo avanti lanciando un nuovo hardware di "radiogoniometria": nRF52811. Questo SoC BLE è compatibile con Bluetooth 5.1 e integra un microprocessore Arm Cortex M4 abbinato alla radio multiprotocollo del SoC wireless nRF52840 di fascia alta di Nordic. Il chip include 192 kB di Flash e 24 kB di RAM.
La Parte 2 di questo articolo spiega come utilizzare piattaforme di sviluppo basate su questi SoC e questi stack (oltre ad altri componenti tra cui array di antenne, microprocessori abbinati, memoria associata e firmware del "motore di localizzazione") per implementare applicazioni pratiche di servizi di localizzazione come la tracciabilità delle risorse e l'IPS.
Conclusione
Il recente miglioramento della Core Specification adottato in Bluetooth 5.1 semplifica l'accesso ai dati IQ. I dati possono essere utilizzati per alimentare algoritmi di radiogoniometria RF che calcolano l'AoA o l'AoD di una trasmissione radio Bluetooth e si servono poi di queste informazioni per stimare la posizione di un trasmettitore in due o tre dimensioni.
Ma mentre gli algoritmi possono essere utilizzati come base di applicazioni pratiche di servizi di localizzazione come la tracciabilità delle risorse e l'IPS, la loro precisione dipende da un array di antenne ben progettato, da un comprovato algoritmo di radiogoniometria RF e da risorse del processore e di memoria sufficienti per eseguire calcoli complessi.
Come verrà mostrato nella Parte 2 di questo articolo, anche se lo sviluppo è ancora tutt'altro che semplice, la disponibilità di piattaforme commerciali Bluetooth 5.1 Direction Finding, array di antenne e firmware del motore di localizzazione semplifica ai progettisti la realizzazione di applicazioni relativi a servizi di localizzazione con una precisione centimetrica.
Riferimenti
- Bluetooth Direction Finding: Presentazione tecnica, Martin Wooley, Bluetooth SIG, marzo 2019.
- Capire le tecniche avanzate di stima degli angoli di Bluetooth per la localizzazione in tempo reale, Sauli Lehtimaki, Silicon Labs, 2018
Esonero della responsabilità: le opinioni, le convinzioni e i punti di vista espressi dai vari autori e/o dai partecipanti al forum su questo sito Web non riflettono necessariamente le opinioni, le convinzioni e i punti di vista di DigiKey o le sue politiche.