

Che cos'è il tempo di inattività dei convertitori di potenza e come si può controllare?
I sempre più elevati requisiti di potenza del settore automotive, dei piccoli veicoli elettrici, degli attrezzi cordless e delle stazioni di ricarica stanno spingendo verso sistemi di alimentazione a 48 V che offrono diversi vantaggi, tra cui maggiore efficienza e perdite inferiori, oltre a dimensioni e peso più contenuti. Tutti questi sistemi di alimentazione convertono l'energia erogata dal bus a 48 V in tensioni utilizzabili, mediante convertitori di potenza.
I convertitori di potenza fanno ricorso a tecniche di alimentazione a commutazione per convertire i 48 V c.c. nelle tensioni selezionate. Un tipico convertitore a 48 V, come in questo caso UCC28251PWR di Texas Instruments, si basa su interruttori di alimentazione configurati a semiponte come i transistor a effetto campo (FET), indicati nella Figura 1 come Q1 e Q2. Questi sono comandati da un controller a modulazione della larghezza di impulso (PMW) per produrre e regolare la tensione di uscita desiderata.
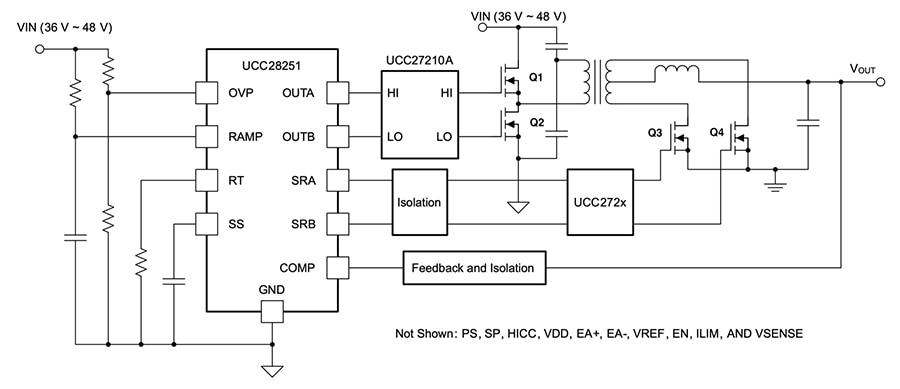 Figura 1: Un convertitore c.c./c.c. standard utilizza un controller PWM per comandare FET di alimentazione configurati in semiponte. Il controller regola la larghezza di impulso sugli ingressi dei FET per produrre e regolare la tensione necessaria all'uscita (VOUT). (Immagine per gentile concessione di Texas Instruments)
Figura 1: Un convertitore c.c./c.c. standard utilizza un controller PWM per comandare FET di alimentazione configurati in semiponte. Il controller regola la larghezza di impulso sugli ingressi dei FET per produrre e regolare la tensione necessaria all'uscita (VOUT). (Immagine per gentile concessione di Texas Instruments)
In questo circuito, i FET (Q1 e Q2) formano una topologia a semiponte e sono accesi alternativamente per comandare il trasformatore. I FET Q3 e Q4 sono raddrizzatori sincroni che riconvertono la forma d'onda di commutazione dal trasformatore secondario in c.c. I raddrizzatori sincroni eliminano le cadute di tensione di serie associate ai raddrizzatori a semiconduttore, migliorando l'efficienza. Questi FET raddrizzatori devono essere comandati in modo sincrono con i dispositivi di commutazione della potenza primari.
Le topologie di inverter alternative includono il ponte intero, o ponte H, che utilizza quattro FET oppure il ponte intero a cascata con sei FET, che viene utilizzato per i convertitori trifase. Tutte queste tecnologie fanno ricorso a una o più coppie di dispositivi di alimentazione. Le coppie sono collegate in serie, come i FET nella Figura 1.
Queste topologie presentano però due problematiche fondamentali. La prima è che il dispositivo di commutazione sull'high-side (Q1) e quello sul low-side (Q2) non possono mai essere accesi contemporaneamente. Se lo fossero, si verificherebbe un cortocircuito tra il bus a 48 V e la messa a terra. Questa condizione è detta shoot-through (conduzione incrociata) e in genere danneggia gli interruttori di alimentazione. Può essere evitata controllando i tempi di commutazione di ogni dispositivo di alimentazione in modo indipendente. L'obiettivo è spegnere il dispositivo attivo prima di accendere quello non attivo.
Il ritardo tra i due eventi (accensione e spegnimento) è detto tempo di inattività primario e viene misurato confrontando i tempi di transizione della tensione gate-sorgente (VGS) dei FET high-side e low-side alla massima larghezza di impulso del controller (Figura 2). Il ritardo tra i due set di transizioni è il tempo di inattività.
 Figura 2: Il tempo di inattività primario viene misurato confrontando i tempi di transizione della VGS dei FET high-side e low-side alla massima larghezza di impulso del controller. Il ritardo tra i due set di transizioni è il tempo di inattività. In questo esempio, è di 1,498 ns e 1,166 ns. (Immagine per gentile concessione di Art Pini)
Figura 2: Il tempo di inattività primario viene misurato confrontando i tempi di transizione della VGS dei FET high-side e low-side alla massima larghezza di impulso del controller. Il ritardo tra i due set di transizioni è il tempo di inattività. In questo esempio, è di 1,498 ns e 1,166 ns. (Immagine per gentile concessione di Art Pini)
Nella Figura 2, il ritardo tra il FET low-side (VGS LO) che si spegne e quello high-side (VGS HI) che si accende è di 1,498 ns. L'altra condizione è tra lo spegnimento del FET high-side e l'accensione del FET low-side, che corrisponde a un ritardo di 1,166 ns. Se entrambi i ritardi misurati sono positivi, il tempo di inattività è accettabile. Tenete presente che questa misurazione viene effettuata alla larghezza di impulso massima dell'uscita del controller PWM.
Durante il tempo di inattività, nessuno dei dispositivi è conduttore; questo rappresenta una perdita indicata come "tempo di inattività". Come per tutte le perdite, è sempre più importante mantenerla al minimo.
La seconda problematica fondamentale è la capacità di coordinare il funzionamento dei raddrizzatori sincroni con le operazioni di commutazione primaria.
Il controller UCC28251PWR mostrato nella Figura 1 può comandare circuiti a ponte intero o semiponte e fornisce sia i segnali di pilotaggio del gate che le uscite del raddrizzatore sincrono con ritardi programmabili. Controlla il tempo di inattività sul lato primario e include anche la protezione dalle sovracorrenti ciclo-ciclo. I ritardi tra le uscite primarie e i segnali di azionamento del raddrizzatore sincrono secondario, detti tempo di inattività secondario, sono programmabili in modo indipendente tramite due resistori esterni.
Il controller PWM viene utilizzato insieme a un CI di pilotaggio del gate a semiponte sul lato primario, UCC27210DDAR di Texas Instruments. In questa configurazione a semiponte, il CI comanda i due ingressi sorgente-gate dei due FET canale N. Influisce sul tempo di inattività primario a causa del proprio ritardo di propagazione intrinseco, che è di 18 ns (tipico). Il problema del ritardo di propagazione può essere ridotto al minimo facendo collimare il ritardo tra le due uscite di pilotaggio del gate. I valori delle uscite del gate driver in CI UCC27210DDAR rimangono entro i 2 ns. Un gate driver della stessa famiglia con caratteristiche di temporizzazione simili viene utilizzato per comandare i FET del raddrizzatore sincrono.
Conclusione
Passare a sistemi a 48 V presenta vantaggi intrinseci per quanto riguarda efficienza, ingombro e peso, ma i progettisti devono capire la causa del tempo di inattività e sapere come mantenerlo al minimo. Come spiegato, sono disponibili CI speciali con le funzioni necessarie per tutelare il funzionamento dei convertitori di potenza a 48 V, che permettono di controllare il tempo di inattività primario e secondario, eliminando i possibili problemi principali delle topologie di circuiti a ponte intero e semiponte.
Informazioni su questo autore

Arthur (Art) Pini è un autore che contribuisce ai contenuti di DigiKey. Art ha conseguito una laurea in ingegneria elettrica presso il City College di New York e un master in ingegneria elettrotecnica presso la City University di New York. Ha oltre 50 anni di esperienza nell'elettronica e ha lavorato in ruoli chiave di ingegneria e marketing presso Teledyne LeCroy, Summation, Wavetek e Nicolet Scientific. È interessato nella tecnologia di misurazione e ha una vasta esperienza con oscilloscopi, analizzatori di spettro, generatori di forme d'onda arbitrarie, digitalizzatori e contatori.

Have questions or comments? Continue the conversation on TechForum, DigiKey's online community and technical resource.
Visit TechForum and the INTERNET350U Desktop UPS (right)")




