Quali sono gli aspetti da considerare nella valutazione della sicurezza dei cobot?
Contributo di Editori nordamericani di DigiKey
2024-04-03
I robot collaborativi (cobot) sono destinati a lavorare con gli esseri umani e supportare la produzione flessibile nelle fabbriche per Impresa 4.0. Rispetto ai robot industriali tradizionali, i cobot sono più semplici, più facili da configurare e non richiedono aree di lavoro isolate e sicure. Essendo progettati per lavorare con le persone, i cobot sono costruiti in modo diverso rispetto ad altri robot industriali e hanno caratteristiche come i sistemi di rilevamento delle collisioni, il feedback di forza, attuatori elastici e servomotori a bassa inerzia.
Essendo concettualmente diversi, i cobot hanno standard di sicurezza specifici. La specifica tecnica dell'Organizzazione internazionale per la standardizzazione (ISO/TS) 15066 specifica i requisiti di sicurezza per i cobot industriali e i loro ambienti di lavoro. Integra i requisiti e le linee guida sul funzionamento dei cobot contenuti nelle norme ISO 10218-1 e ISO 10218-2.
Questo articolo esamina brevemente i requisiti della norma ISO/TS 15066 nell'ottica delle norme ISO 10218-1 e 10218-2. In seguito, vengono prese in considerazione le complessità della collaborazione, compresa la definizione dello spazio di lavoro collaborativo. Si esaminano i fattori legati alla sicurezza dei robot, come le caratteristiche di sicurezza integrate nei cobot e le funzioni di sicurezza esterne necessarie, insieme a dispositivi esemplari come i sensori di prossimità, le barriere luminose e i tappetini di contatto di sicurezza. Infine, si conclude con una breve rassegna di alcune applicazioni specifiche per le considerazioni sulla sicurezza dei cobot.
Esistono diversi standard di sicurezza fondamentali per i robot industriali e i cobot. La norma ISO/TS 15066 descrive in dettaglio i requisiti di sicurezza per i cobot industriali e l'ambiente di lavoro ed è stata redatta per sviluppare e integrare i requisiti limitati delle norme precedenti, come la serie ISO 10218. La norma ISO 10218-1 si concentra sui robot e sui dispositivi robotici in generale, mentre la norma ISO 10218-2 si concentra sui sistemi robotici e sull'integrazione. La norma R15.06 dell'American National Standards Institute/Robotics Industry Association (ANSI/RIA) è un'adozione nazionale delle norme ISO 10218-1 e ISO 10218-2.
Complessità della collaborazione
Prima di entrare nei dettagli della sicurezza dei cobot, è utile definire ciò che si intende per collaborazione. La collaborazione nella robotica è complessa e comprende tre fattori:
- Secondo la norma ANSI/RIA R15.06, un cobot è un "robot progettato per l'interazione diretta con un essere umano all'interno di uno spazio di lavoro collaborativo definito".
- Secondo la norma ISO/TS 15066, un'operazione collaborativa è uno "stato in cui un sistema robotico appositamente progettato e un operatore lavorano all'interno di uno spazio di lavoro collaborativo".
- Infine, secondo la norma ANSI/RIA R15.06, uno spazio di lavoro collaborativo è lo "spazio di lavoro all'interno dello spazio protetto in cui il robot e l'uomo possono svolgere attività simultaneamente durante la produzione".
Si tratta di definire lo spazio di lavoro collaborativo "all'interno dello spazio protetto". Lo spazio protetto comprende uno strato di protezione oltre alle funzioni di sicurezza standard incluse nel cobot.
Le funzioni di protezione più comuni integrate nei cobot includono sistemi di rilevamento dei contatti basati su misurazioni della coppia in ogni giunto, che monitorano eventuali impatti inaspettati, ostruzioni o forze o coppie eccessive. Dovrebbero essere presenti anche sistemi di frenatura automatica e sblocco manuale dei freni per spostare il braccio senza corrente.
Il contatto inatteso con la persona da parte del cobot è particolarmente preoccupante. Le norme stabiliscono che il contatto deve essere impedito in qualsiasi punto della testa di una persona. Inoltre, lo standard suddivide il corpo in 29 aree specifiche e dettaglia le limitazioni per due tipi di contatto:
- Il contatto transitorio è un evento dinamico e in movimento in cui il cobot colpisce una persona. Le limitazioni si basano sulla posizione, sull'inerzia e sulla velocità relativa.
- Il contatto quasi statico si verifica quando una parte del corpo è intrappolata tra il cobot e una superficie. Le limitazioni si basano sulla pressione e sulla forza legate agli effetti di schiacciamento e serraggio.
Le specifiche forniscono indicazioni, non limiti assoluti, sulla base di considerazioni applicative. Il documento afferma inoltre che la guida è informativa e riflette le best practice attuali, poiché la collaborazione tra persone e robot è un campo nuovo e la ricerca è ancora in corso.
Il susseguirsi della collaborazione
Non esiste un'unica applicazione collaborativa. Le persone e i cobot possono interagire e collaborare in vari modi. Le applicazioni collaborative vanno dalla coesistenza - in cui un robot si ferma quando una persona entra nello spazio di lavoro collaborativo - a un'attività interattiva in cui la persona tocca il cobot mentre è in funzione (Figura 1).
 Figura 1: La collaborazione tra uomo e robot comprende un ampio ventaglio di possibili livelli di interazione. (Immagine per gentile concessione di SICK)
Figura 1: La collaborazione tra uomo e robot comprende un ampio ventaglio di possibili livelli di interazione. (Immagine per gentile concessione di SICK)
È necessaria una valutazione dei rischi per identificare le esigenze di sicurezza delle singole applicazioni collaborative, comprendente l'identificazione, la valutazione e la riduzione dei pericoli e dei rischi associati all'applicazione. La norma ISO 10218 contiene un elenco di caratteristiche di sicurezza che possono essere appropriate in varie circostanze, ma non contiene requisiti definitivi. La norma ISO/TS 15066 fornisce ulteriori dettagli alla valutazione del rischio rappresentato dai cobot. In ogni caso, l'obiettivo della valutazione del rischio è identificare i dispositivi e i sistemi di sicurezza esterni necessari per garantire l'implementazione sicura delle applicazioni collaborative.
Per un approfondimento sulla valutazione del rischio e sui robot, si veda l'articolo "Integrare in modo sicuro ed efficiente gli AMR nelle operazioni per l'Impresa 4.0 per ricavare i massimi benefici".
Protezione ed efficienza
Sebbene i cobot siano progettati per funzionare in sicurezza, ulteriori livelli di protezione possono migliorare l'efficienza delle applicazioni collaborative. Senza ulteriore sicurezza, quando una persona entra nello spazio di lavoro collaborativo, la norma ISO/TS 15066 impone una velocità massima di 0,25 metri al secondo per asse. Per la maggior parte dei cobot, questo valore è molto lento.
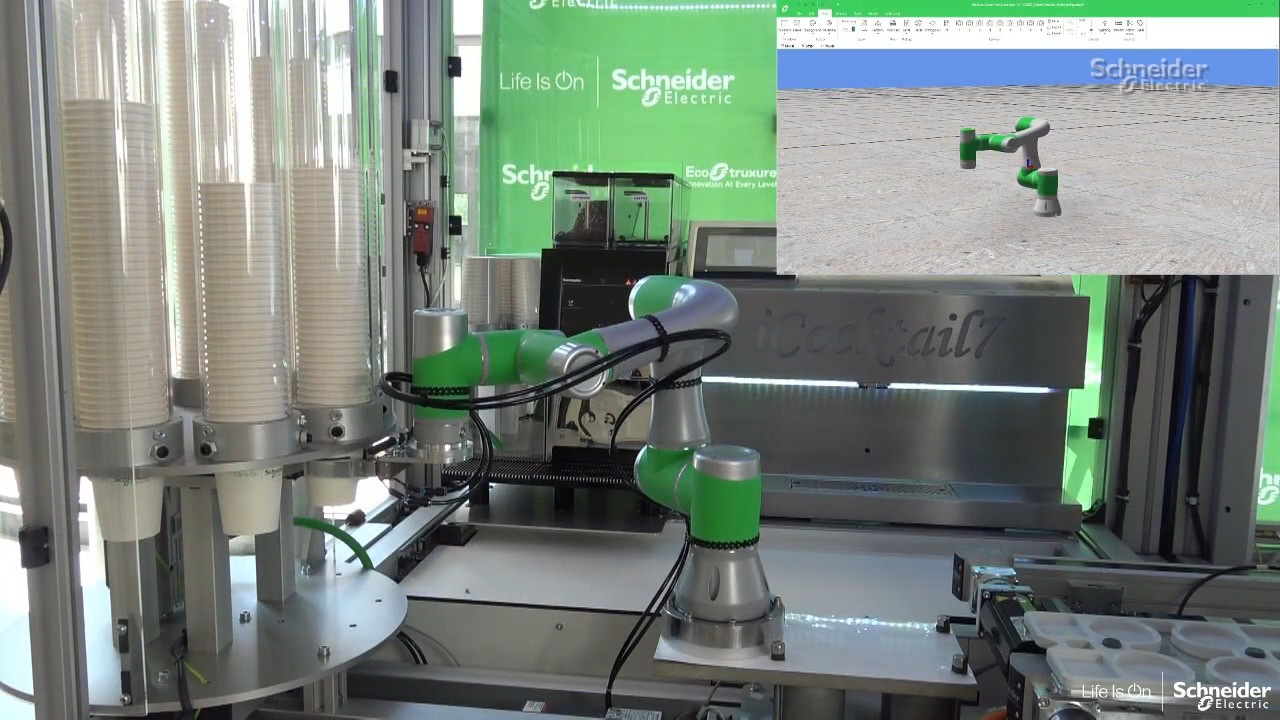
Ad esempio, il cobot LXMRL12S0000 Lexium di Schneider Electric ha un carico utile massimo di 12 kg, un raggio operativo (campo di lavoro) di 1327 mm, una precisione di posizionamento di ±0,03 mm e una velocità massima dell'estremità utensile di 3 m/s, ossia 12 volte superiore al massimo consentito dalla norma ISO/TS 15066 quando una persona si trova nello spazio di lavoro collaborativo (Figura 2).
 Figura 2: Questo cobot può muoversi 12 volte più velocemente del massimo consentito dalla norma ISO/TS 15066 quando una persona si trova nello spazio di lavoro collaborativo. (Immagine per gentile concessione di Schneider Electric)
Figura 2: Questo cobot può muoversi 12 volte più velocemente del massimo consentito dalla norma ISO/TS 15066 quando una persona si trova nello spazio di lavoro collaborativo. (Immagine per gentile concessione di Schneider Electric)
In molte applicazioni, il cobot può operare da solo per lunghi periodi. Quindi, il rilevamento della presenza o dell'assenza di persone nello spazio di lavoro collaborativo può offrire un funzionamento molto più rapido e una maggiore efficienza quando non c'è nessuno. I dispositivi più comuni per rilevare la presenza di persone sono gli scanner di sicurezza, le barriere luminose e i tappetini da pavimento di contatto di sicurezza. Ciascuna tecnologia offre una serie di vantaggi propri e spesso viene utilizzata in combinazione con altre.
Scanner di sicurezza
Gli scanner di sicurezza monitorano un'area designata per rilevare la presenza di persone. Sono in grado di determinare la distanza di una persona e di implementare varie zone di avvertimento oltre alla zona di sicurezza attiva.
Il modello OS32C-SP1-4M di Omron è un buon esempio di scanner laser di sicurezza progettato per l'uso con i cobot. Ha un raggio di sicurezza fino a 4 metri e può supportare zone di allarme multiple fino a 15 metri. Include 70 set standard di combinazioni di zone di sicurezza e di avvertimento per supportare spazi di lavoro collaborativi complessi. Inoltre, la risoluzione minima dell'oggetto può essere impostata su 30, 40, 50 o 70 mm e il tempo di risposta può variare da 80 a 680 ms, aumentando ulteriormente la flessibilità dell'applicazione (Figura 3).
 Figura 3: Questo scanner di sicurezza ha un raggio di sicurezza fino a 4 m e può supportare zone di allarme multiple fino a 15 m. (Immagine per gentile concessione di DigiKey)
Figura 3: Questo scanner di sicurezza ha un raggio di sicurezza fino a 4 m e può supportare zone di allarme multiple fino a 15 m. (Immagine per gentile concessione di DigiKey)
Barriere fotoelettriche
Le barriere fotoelettriche possono misurare la presenza di persone e possono essere progettate per rilevare oggetti di varie dimensioni, come le dita o le mani. A differenza degli scanner di sicurezza, le barriere fotoelettriche non misurano la distanza. Inviano una serie di fasci di luce tra array lineari di emettitori e ricevitori e sono in grado di rilevare quando un oggetto interrompe uno o più fasci.
In termini di sicurezza, esistono due classificazioni principali delle barriere fotoelettriche: Tipo 2 e Tipo 4. Tutte hanno un aspetto simile, ma sono progettate per fornire livelli di sicurezza diversi. Il Tipo 4 controlla lo spazio protetto che definisce uno spazio di lavoro collaborativo. Le barriere fotoelettriche di Tipo 2 sono progettate per applicazioni a basso rischio.
Le barriere fotoelettriche proteggono i perimetri e sono disponibili con diversi livelli di risoluzione, come 14 mm per il rilevamento delle dita e 24 mm per il rilevamento della mano. Il modello SLC4P24-160P44 di Banner Engineering, è un kit di barriere fotoelettriche di Tipo 4 con un array di emettitori e ricevitori e ha una risoluzione di 24 mm per proteggere persone e macchine come i cobot (Figura 4). Gli emettitori hanno una fila di diodi luminescenti agli infrarossi modulati e sincronizzati. I ricevitori hanno una fila corrispondente di fotorilevatori sincronizzati. Gli emettitori hanno un raggio di 2 metri e le barriere luminose possono essere installate in lunghezze comprese tra 160 e 320 mm con incrementi di 80 mm.
 Figura 4: Questa barriera fotoelettrica di Tipo 4 ha una risoluzione di 24 mm. (Immagine per gentile concessione di Banner Engineering)
Figura 4: Questa barriera fotoelettrica di Tipo 4 ha una risoluzione di 24 mm. (Immagine per gentile concessione di Banner Engineering)
Gli scanner laser di sicurezza e le barriere fotoelettriche sono mezzi senza contatto che migliorano la sicurezza degli spazi di lavoro collaborativi. Tuttavia, possono essere difficili da usare in ambienti otticamente difficili, come aree con superfici altamente riflettenti che possono inviare interferenze luminose indesiderate e possono inciampare a causa di perdite di olio o grasso o di polvere o umidità eccessive.
Alcuni di questi sensori ottici includono regolazioni della sensibilità che possono contribuire a mitigare in parte le interferenze. Tuttavia, queste regolazioni della sensibilità possono aumentare i tempi di risposta e compromettere altre prestazioni. Un'altra soluzione consiste nell'utilizzare un tappetino di contatto di sicurezza insieme a dispositivi di rilevamento ottico.
Tappetino di contatto di sicurezza
I tappetini di contatto di sicurezza hanno due piastre conduttive separate da uno strato isolante rasterizzato e possono essere utilizzati da soli o in combinazione con altri tipi di sensori. Se una persona calpesta il tappetino, la piastra conduttiva superiore viene premuta e contatta la piastra inferiore, attivando un segnale di allarme (Figura 5). L'esterno dei tappetini è in poliuretano, resistente allo scivolamento e impermeabile all'acqua, allo sporco e all'olio. Il tappetino SENTIR modello 1602-5533 di ASO Safety Solutions può essere collegato in serie fino a 10 unità a un'unica unità di monitoraggio per una copertura massima di 10 m2.
 Figura 5: Quando viene calpestato il tappetino, gli strati conduttori superiore e inferiore entrano in contatto, attivando un segnale di allarme. (Immagine per gentile concessione di ASO Safety Solutions)
Figura 5: Quando viene calpestato il tappetino, gli strati conduttori superiore e inferiore entrano in contatto, attivando un segnale di allarme. (Immagine per gentile concessione di ASO Safety Solutions)
La sicurezza è nei dettagli
Non esiste una formula unica per garantire la sicurezza. Ogni applicazione collaborativa è diversa e deve essere gestita in base alle sue caratteristiche ed esigenze uniche. Un fattore chiave da considerare è l'applicazione che richiede la collaborazione (Figura 1). Quanto più stretta è l'interazione tra il cobot e le persone, tanto più sono necessarie misure di salvaguardia.
Ci sono altri dettagli da considerare, tra cui:
- Ogni sede deve essere sottoposta a una valutazione dettagliata dei rischi per verificare se il cobot è stato spostato da una postazione di lavoro all'altra. Anche se sembrano uguali, piccole variazioni possono fare la differenza in termini di sicurezza.
- Se nello spazio di lavoro collaborativo sono presenti altre macchine, queste devono essere collegate al sistema di spegnimento o al rallentamento di sicurezza per il cobot?
- Questo articolo si è concentrato sull'hardware legato alla sicurezza, ma per i sistemi in rete - sempre più diffusi - la sicurezza informatica è un aspetto importante per evitare interferenze con il funzionamento dei cobot o con i sistemi di sicurezza.
Conclusione
La sicurezza dei cobot è complessa. Inizia con la definizione dello spazio di lavoro collaborativo all'interno dello spazio protetto e richiede una valutazione dei rischi dell'operazione collaborativa. Norme come ISO/TS 15066 e la serie ISO 10218 sono importanti e forniscono raccomandazioni e linee guida. I cobot includono funzioni di sicurezza di base come sistemi di rilevamento delle collisioni, feedback di forza, attuatori elastici e servomotori a bassa inerzia. A seconda delle specificità dell'applicazione collaborativa, possono essere necessari altri dispositivi di sicurezza come sensori di prossimità, barriere luminose e tappetini di sicurezza.
Esonero della responsabilità: le opinioni, le convinzioni e i punti di vista espressi dai vari autori e/o dai partecipanti al forum su questo sito Web non riflettono necessariamente le opinioni, le convinzioni e i punti di vista di DigiKey o le sue politiche.