

Motori per maker – Parte 1: il kit Adafruit fa girare la testa
Ammetto di essere un po' in imbarazzo. Ho deciso di aggiungere il movimento a un paio di progetti che porto avanti per hobby, ma sono praticamente alle prime armi quando si tratta di scegliere e utilizzare i diversi tipi di motori e attuatori disponibili in commercio. Non conosco neanche i pro e i contro legati ad aspetti quali momento torcente, rapporti di riduzione e simili.
Ai tempi dell'università avevo seguito alcuni corsi su questi argomenti, ma parliamo della fine degli anni '70, cioè ormai più di 40 anni fa. Un'eternità. Sono praticamente certo che i miei professori mi avessero insegnato tutto ciò che serve, ma temo che i famosi cassetti della memoria oggi non mi siano molto di aiuto.
Come vi ho detto spesso, quando vedo un LED che lampeggia non capisco più niente. Infatti, il primo di questi progetti che ho realizzato per hobby è un robot che come occhi ha LED tricolore. All'inizio, l'intenzione era quella di creare una piattaforma efficace ed economica (alcuni diranno sbrigativa) con cui fare esperimenti, quindi presi semplicemente legno e cartone e misi insieme il tutto con un po' di colla a caldo.
Per un po' di tempo fui soddisfatto. Poi però uno dei miei amici venne fuori con l'idea che un po' di movimento avrebbe decisamente migliorato le cose. Nello specifico, suggerì di far muovere gli occhi da una parte all'altra e di farli inclinare in avanti e indietro. E magari di far girare la testa, inclinarla e piegarla ai lati.
Tutto questo ci riporta al fatto che so veramente poco dei vari tipi di motori e attuatori disponibili. Cercherò di non sminuirmi troppo: in effetti conosco le differenze sostanziali tra motori c.c. a spazzole, motori trifase brushless, motori passo-passo, servomotori e attuatori lineari. Ma quando si tratta di scegliere quale usare per le diverse applicazioni, ad esempio la testa di un robot, non sono così ferrato.
Partiamo dai servomotori
Mi serve sicuramente un po' di ricerca, che senza dubbio darà vita a un blog futuro. Nel frattempo, per iniziare a provare qualcosa, ho appena ordinato due kit di automazione robotica 1967 di Adafruit (Figura 1).
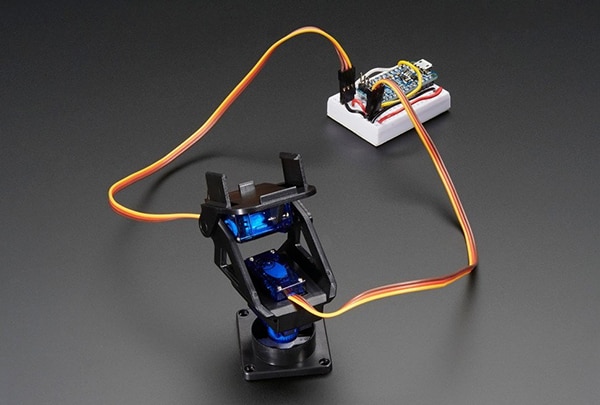 Figura 1: Il kit 1967 viene fornito completamente assemblato, con due micro servocomandi (tipo SG-90 o SG-92) che gli permettono di girare a 180° da una parte all'altra e di inclinarsi a 150° verso l'alto e il basso. (Immagine per gentile concessione di Adafruit)
Figura 1: Il kit 1967 viene fornito completamente assemblato, con due micro servocomandi (tipo SG-90 o SG-92) che gli permettono di girare a 180° da una parte all'altra e di inclinarsi a 150° verso l'alto e il basso. (Immagine per gentile concessione di Adafruit)
Allora, so che posso utilizzare la modulazione della larghezza di impulso per controllare direttamente i servomotori tramite i pin dell'uscita digitale di un microcontroller, ma ho sempre preferito mantenere un certo isolamento tra il microcontroller e il mondo esterno, pur trattandosi a volte di poco più di un semplice transistor a effetto campo (FET).
Supponendo di usare i servomotori per la realizzazione finale, con il tempo avrò bisogno di controllarne almeno due per ogni occhio e almeno tre o quattro per la testa. Ho quindi deciso di investire in una delle schede driver PWM 815 di Adafruit, a 12 bit e 16 canali (Figura 2).
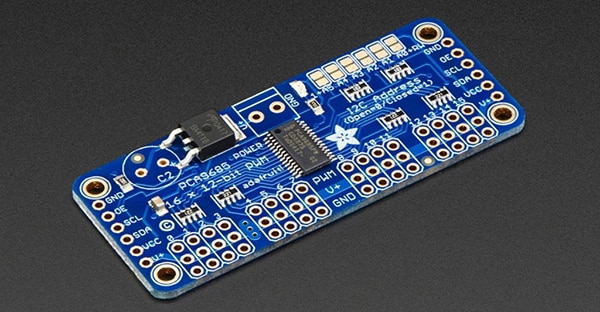 Figura 2: Tramite l'interfaccia I²C, utilizzando solo due pin del microcontroller, questa scheda PWM a 16 canali può essere utilizzata per controllare sia i LED che i servomotori. (Immagine per gentile concessione di Adafruit)
Figura 2: Tramite l'interfaccia I²C, utilizzando solo due pin del microcontroller, questa scheda PWM a 16 canali può essere utilizzata per controllare sia i LED che i servomotori. (Immagine per gentile concessione di Adafruit)
L'aspetto eccezionale di questa scheda è che viene controllata tramite un'interfaccia I²C, che quindi richiede solo due dei pin dell'uscita digitale del microcontroller. Ognuna delle 16 uscite della PMW può essere utilizzata per controllare un LED o un servomotore.
Motori c.c. brushless
Per qualche strana coincidenza, recentemente ho iniziato a valutare un altro progetto che necessita di motori. È iniziato tutto tre o quattro anni fa, quando un amico mi regalò uno straordinario condensatore variabile dei giorni andati (Figura 3).
 Figura 3: Questo condensatore variabile utilizza un set di piastre metalliche per formare lo statore fisso, interleaved con un secondo set di piastre che formano il rotore mobile, con l'aria come dielettrico. (Immagine per gentile concessione di Max Maxfield)
Figura 3: Questo condensatore variabile utilizza un set di piastre metalliche per formare lo statore fisso, interleaved con un secondo set di piastre che formano il rotore mobile, con l'aria come dielettrico. (Immagine per gentile concessione di Max Maxfield)
Ho cercato di nascosto su Google informazioni a riguardo e ho scoperto che il condensatore variabile con dielettrico ad aria fu inventato dall'ingegnere ungherese Dezső Korda, che per questo ottenne un brevetto in Germania nel 1893.
Questo dispositivo occupa un'area di circa 30x30x30 cm3 ed è quindi molto carino da vedere. La struttura principale è formata da metalli diversi e le strutture che formano il condensatore sono isolate elettricamente dal telaio per mezzo di separatori in vetro isolante. Non so se qualcuno lo costruisca ancora (ne dubito), ma in tal caso non oso pensare a quanto potrebbe costare.
Prima di regalarmelo, questo amico aveva montato il condensatore su una base in legno (che vorrei sostituire con qualcosa di più scenico), aveva rimosso i fermi in modo che potesse ruotare continuamente a 360° e aveva aggiunto un motore e una cinghia di trasmissione (visibile in basso a destra nella foto).
Mi vergogno a dire che questa audace bellezza ha trascorso gli ultimi anni su uno scaffale nel mio ufficio ad accumulare polvere. Un paio di settimane fa mi è capitato sotto gli occhi e ho pensato: "Ci devo fare qualcosa".
Se devo essere onesto, non ho pensato che ci volesse molto, finché non ho visto i tre fili del motore interno. A quel punto mi sono un po' scoraggiato. Ho chiamato il mio amico, che mi ha confermato che si tratta di un motore brushless trifase a 12 V. Mi ha spiegato di aver usato questo tipo di motore perché è molto tranquillo, sia dal punto di vista del rumore che da quello elettrico. Adesso devo capire come controllare la velocità e la direzione di rotazione di questa piccola peste.
Conclusione
Mi conosco e so che tendo a buttarmi a capofitto nelle cose. E so anche che il movimento farà parte di un numero sempre più alto dei progetti a cui mi dedicherò per hobby in futuro. Quindi inizierò a imparare qualcosa di più su motori e attuatori. Il kit 1967 di Adafruit e la scheda PWM 817 si sono dimostrati molto utili per iniziare, e con molta probabilità faranno parte dei miei progetti futuri.
Ho anche ordinato una copia di "Motors for Makers: A Guide to Steppers, Servos, and Other Electrical Machines" di Matthew Scarpino.
Vi dirò di più in un prossimo blog. Nel frattempo, avete qualche osservazione? Come al solito, i vostri commenti, le domande e i suggerimenti sono più che benvenuti.
Informazioni su questo autore

Clive "Max" Maxfield ha conseguito la laurea in ingegneria di controllo nel 1980 presso l'Università di Sheffield Hallam, Inghilterra, e ha iniziato la carriera lavorativa come progettista delle unità di elaborazione centrale (CPU) per computer mainframe. Nel corso degli anni, Max ha progettato di tutto, dai chip di silicio alle schede a circuito stampato, dagli amplificatori per onde cerebrali ai motori di prognosticazione steampunk (davvero!). È stato anche a capo della Electronic Design Automation (EDA) per oltre 30 anni.
Max è autore e/o coautore di diversi libri, tra cui i titoli: Designus Maximus Unleashed (vietato in Alabama), Bebop to the Boolean Boogie (An Unconventional Guide to Electronics), EDA: Where Electronics Begins, FPGAs: Instant Access e How Computers Do Math. Visita il suo blog "Max's Cool Beans".

Have questions or comments? Continue the conversation on TechForum, DigiKey's online community and technical resource.
Visit TechForum




