

Robot mobile autonomo
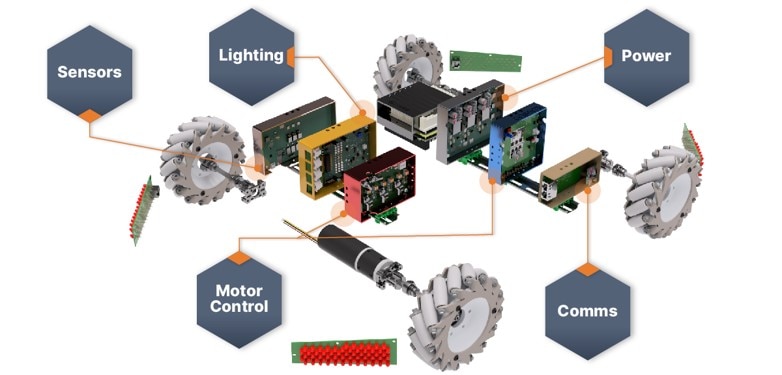
Il concetto di robot mobile autonomo (Autonomous Mobile Robot) di onsemi è una soluzione robotica completa progettata con soluzioni altamente efficienti e innovative di onsemi. Il concetto può essere utilizzato per progettare vari tipi di robot, cobot, utensili elettrici e veicoli a guida autonoma combinando diverse soluzioni intelligenti e di alimentazione di onsemi.
- Kit di controllo motori BLDC
- Carica delle batterie e conversione di potenza
- Sensori di immagine e soluzioni Lidar
- Soluzioni di connettività
- Illuminazione a LED
- Cobot e robot industriali
- Robot di magazzino
- Robot per le consegne
- Utensili elettrici
- Robot agricoli
- Tosaerba
- Veicoli a guida autonoma

Video sui robot mobili autonomi -

Intervista Embedded World 2024 -

Parliamo di tecnologia: robotica e IA fisica -
- Soluzioni di controllo motori BLDC
- Soluzioni di rilevamento
- Soluzioni di alimentazione
- Soluzioni di illuminazione
- Soluzioni di comunicazione
Soluzioni di controllo motori BLDC
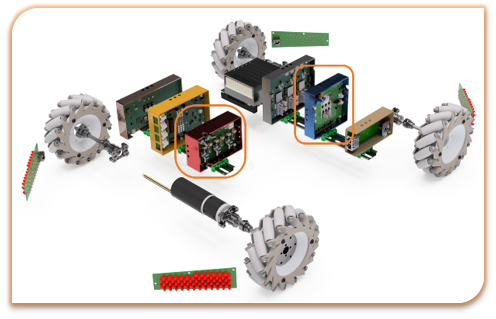
In primo luogo abbiamo la soluzione di controllo motori BLDC, per la quale possiamo scegliere tre diverse piattaforme. La prima è la nostra soluzione per lo sviluppo di motori integrata basata su ecoSpin. Si tratta di una soluzione completamente integrata per il controllo di motori BLDC. È dotata di diodi bootstrap integrati. Oltre a un amplificatore per rilevamento, a un gate driver e a un microcontroller. È disponibile il firmware.
La seconda soluzione è il sistema basato su Xilinx che utilizza MOSFET e gate driver discreti. Può essere utilizzato per le piattaforme in cui è necessaria una maggiore potenza di calcolo a livello del controllo motori.
Infine, abbiamo una soluzione basata sugli utensili elettrici.
Prodotti in evidenza

NCD83591MNTXG
Vedi i dettagli
NVMFS5C410NWFAFT1G
Vedi i dettagli
NCP730BMT250TBG
Vedi i dettagli
NCH-RSL15-512-101Q40-ACG
Vedi i dettagli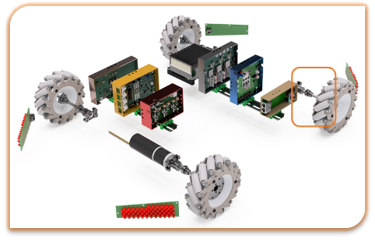
Soluzioni di rilevamento
Il robot autonomo deve vedere dove sta andando: per questo ha bisogno di un sensore di immagine e di un modulo telecamera. La nostra dimostrazione utilizza un modulo telecamera USB E-con. Utilizza un sensore di immagine a otturatore totale, ideale per i robot autonomi. I sensori a otturatore totale memorizzano i dati dei pixel di ciascuna immagine nello stesso momento. I sensori di questo tipo non presentano gli artefatti del movimento che si riscontrano nei sensori a otturatore progressivo, quindi sono ideali per l'uso quando il movimento avviene all'interno di fabbriche o magazzini. I sensori a otturatore progressivo hanno una gamma dinamica più elevata rispetto ai sensori a otturatore totale, quindi possono funzionare meglio in presenza di differenze estreme nelle condizioni di illuminazione. Tuttavia, per i robot autonomi che lavorano nelle fabbriche le condizioni di illuminazione sono adatte a consentire l'uso di sensori a otturatore totale. Il sensore di immagine AR0234CS supporta immagini Full HD a una frequenza di sessanta fotogrammi al secondo.
I robot autonomi con bracci mobili utilizzano servomotori per controllare la posizione dei bracci e delle pinze da presa. Ciò richiede un feedback di posizione preciso. Inoltre, se il robot autonomo viene spento e poi riacceso, è importante conoscere la posizione esatta del braccio. Un sensore di posizione assoluta può determinare la posizione del braccio in qualsiasi momento. I sensori ottici possono farlo, ma necessitano di molti componenti esterni e sono sensibili alle variazioni di temperatura. Onsemi è un fornitore affermato di sensori di posizione personalizzati ad alta affidabilità per il mercato automotive. Sulla base di questa esperienza, abbiamo sviluppato una soluzione con doppio sensore di posizione induttivo che utilizza il controller a sensore NCS32100. Maggiori dettagli su questo prodotto saranno forniti più avanti.
Prodotti in evidenza

AR0234CSSM00SUKA0-CR
Vedi i dettagli
AR1335CSSM11SMKA0-CP
Vedi i dettagli
AR0822NPSC10SMTA0-DR
Vedi i dettagli
NCS32100XMNTXG
Vedi i dettagli
NCV75215DB001R2G
Vedi i dettagli
Soluzioni di alimentazione
Vediamo ora l'alimentazione del robot autonomo. Sicuramente è alimentato da una batteria, che a un certo punto deve essere caricata. Il robot autonomo ha l'intelligenza di portarsi fino al punto di ricarica. Un braccio robotico esterno collega il cavo di alimentazione al robot autonomo per caricarlo.
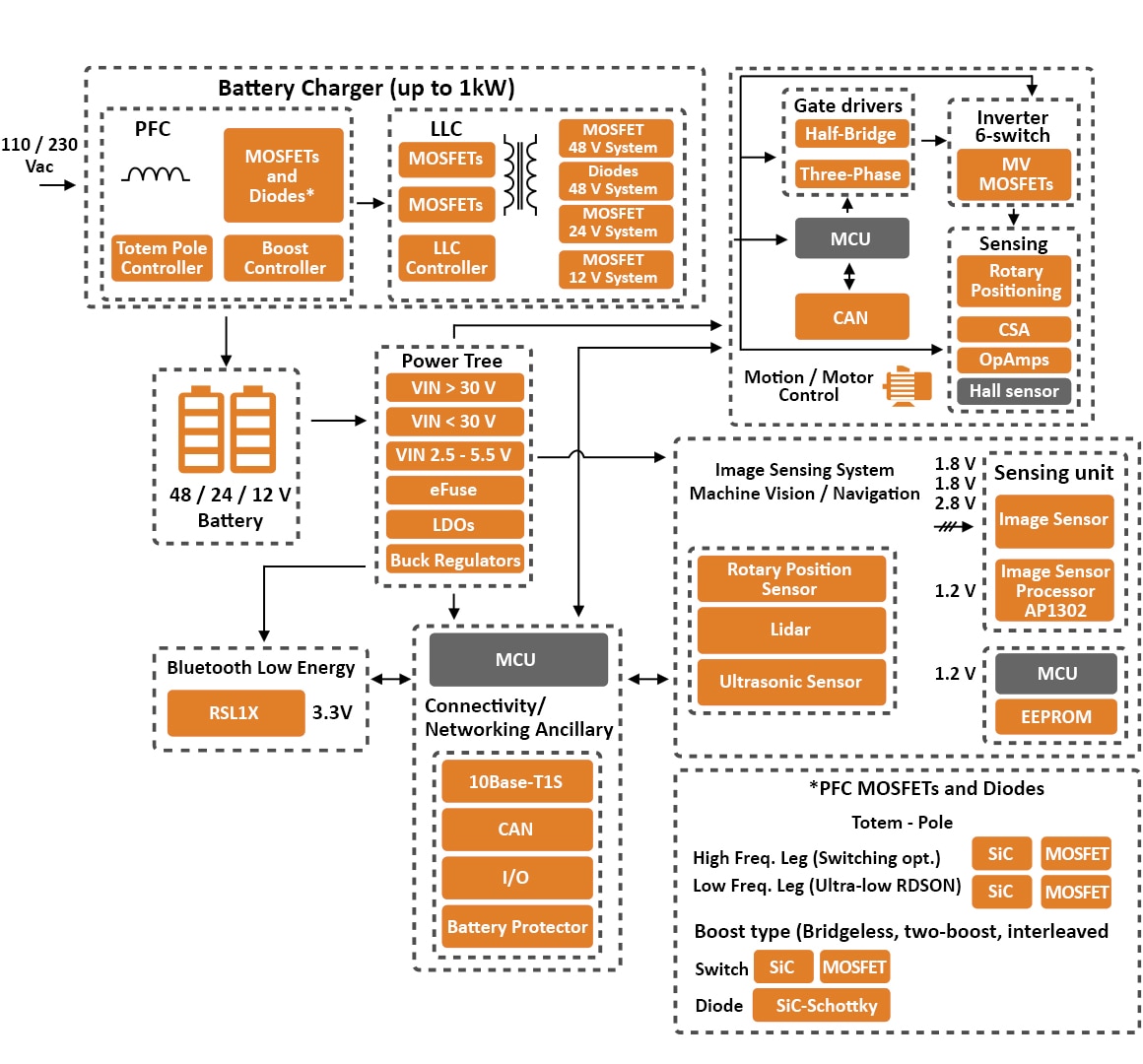
Il caricabatterie con ingresso di rete c.a. da 600 W per il robot autonomo è composto da tre sezioni: uno stadio PFC, un convertitore LLC isolato e un convertitore buck. Lo stadio PFC è un doppio stadio PFC interleaved che utilizza il controller PFC NCP1632. Ciò assicura che l'energia prelevata dalla linea c.a. abbia un buon fattore di potenza e una bassa distorsione armonica totale. Lo stadio LLC converte l'uscita dello stadio PFC, di circa 400 V c.c., in una tensione di uscita di 48 V c.c. utilizzando una topologia LLC a semiponte con presa centrale. NCP1399 è utilizzato nel progetto corrente, mentre il più avanzato NCP13994 è consigliato per i progetti più nuovi. L'uscita viene raddrizzata in modo sincrono utilizzando due MOSFET a media tensione FDMS86202ET controllati da due controller di raddrizzamento sincrono NCP4305D.
I profili di carica delle batterie comprendono modalità di carica a corrente costante che consentono di ottenere un ampio intervallo di tensioni di funzionamento. Gli stadi LLC hanno un intervallo di funzionamento ristretto per il loro rapporto di conversione della tensione, o guadagno, quindi non funzionano bene in modalità a corrente costante. Nel caricabatterie del robot autonomo è presente un terzo stadio buck che utilizza FAN65008, in grado di funzionare con un intervallo molto ampio di rapporti di conversione della tensione, quindi può fornire facilmente i profili di corrente e tensione richiesti per la carica della batteria.
Prodotti in evidenza

NCP1681ABD2R2G
Vedi i dettagli in contenitore 10-DFN (4x4)")
NCP51530BMNTWG
Vedi i dettagli
NCP51561BADWR2G
Vedi i dettagli 291 W (Tc), foro passante TO-247-3")
NTHL045N065SC1
Vedi i dettagli
NCP13994AADR2G
Vedi i dettagli
NCP51561BADWR2G
Vedi i dettagli
NTHL045N065SC1
Vedi i dettagli
NCP4318ALSDR2G
Vedi i dettagli
NCP1076STAT3G
Vedi i dettagli
FAN65008B
Vedi i dettagli
FODM1008
Vedi i dettagli, 102 A (Tc) 3,3 W (Ta) 187 W (Tc) a montaggio superficiale 8-PQFN (5x6)")
FDMS86202ET120
Vedi i dettagli
RSL15
Vedi i dettagli
Soluzioni di illuminazione
La nostra soluzione robotica autonoma è dotata di luci a LED per segnalare la sua presenza alle persone e agli altri robot. Luci a LED aggiuntive vengono utilizzate per la segnalazione. Onsemi è un fornitore affermato di soluzioni per fari, luci posteriori, luci di marcia diurna e luci di segnalazione per il mercato automobilistico e dei veicoli industriali. Abbiamo selezionato due prodotti da questo ampio portafoglio per utilizzarli nel nostro robot autonomo.
La soluzione NCV7685 per luci posteriori a LED per autoveicoli è una soluzione driver + MOSFET integrato semplice da usare. Sono presenti 12 canali paralleli da 60 mA controllati da PWM tramite un'interfaccia I2C. Se il progettista desidera far funzionare il driver LED senza un microcontroller esterno, può preprogrammare registri OTP specifici per impostare il ciclo di lavoro. Il driver LED dispone di una diagnostica dei guasti che può essere letta dal microcontroller per rilevare errori specifici quali condizioni di cortocircuito sul pin che imposta la corrente, un errore nella comunicazione I2C, un avviso termico, uno spegnimento termico e condizioni di carico aperto. Queste informazioni possono essere utilizzate dal microcontroller per supportare le azioni correttive necessarie, come la comunicazione dell'errore a un controller host centrale che monitora i robot autonomi locali.
Prodotti in evidenza

NCV7685DQR2G
Vedi i dettagli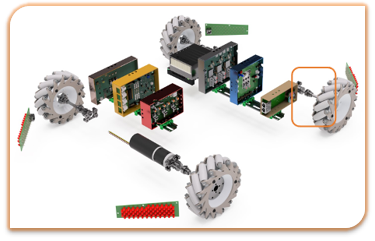
Soluzioni di comunicazione
Tradizionalmente, i fornitori di robotica sceglievano il protocollo CAN automotive per la comunicazione cablata tra i diversi nodi all'interno del robot, inclusi BLDC, illuminazione, processore e alcuni sensori. Il protocollo CAN esiste da decenni; utilizza cavi a doppino intrecciato non schermato (UTP) leggeri ed economici in una topologia multi-drop o a margherita, consentendo la comunicazione tra i nodi a una velocità compresa tra 2 Mbps e 5 Mbps. Con il passare del tempo, i robot hanno iniziato ad acquisire maggiore autonomia e a lavorare in modo più armonioso con gli esseri umani, pertanto si è reso necessario potenziare l'intelligenza robotica. L'intelligenza robotica viene potenziata aggiungendo al robot capacità di elaborazione e sensori, quali Lidar, sensori di immagine, ultrasuoni, radar e posizionamento induttivo. I sensori di immagine e il Lidar stanno favorendo l'uso di collegamenti di comunicazione punto-punto (p2p) verso il nodo del processore, richiedendo velocità dati più elevate, come Gigabit Ethernet. Uno svantaggio di CAN è che richiede un gateway tra Ethernet e CAN, poiché sono protocolli diversi.
Nel 2019 l'Ethernet Alliance ha ratificato lo standard IEEE802.3cg per 10BASE-T1S, come sostituto "All-Ethernet" di CAN. Ora con 10BASE-T1S è possibile comunicare da 2 a 3 volte più velocemente rispetto al protocollo CAN sulla stessa coppia di fili (Single-Pair Ethernet, o SPE), eliminando il costo e il peso aggiuntivi del gateway utilizzando i controller NCN26010 o NCN26000 di onsemi.
Prodotti in evidenza

NCN26010
Vedi i dettagli
NCN26000
Vedi i dettagli
NCV7340
Vedi i dettagli
NCV7342
Vedi i dettagli
NCV7343
Vedi i dettagli
NCV7344
Vedi i dettagli
NCV7349
Vedi i dettagli
NCV7351
Vedi i dettagli
NCV7356
Vedi i dettagli
NCV7357
Vedi i dettagli
NCV7390
Vedi i dettagli
NCV7446
Vedi i dettagli
NCV7450
Vedi i dettagli

